当研究室で保有する設備や機材を紹介します.レーダの実験で必要となる簡易電波暗室やベクトル・ネットワーク・アナライザをはじめ,ミリ波レーダ装置とそれを搭載するための産業用ドローンなど,まだ少ないですが基本的な設備や機材はそろっています.今後も拡充していく予定です.
簡易電波暗室
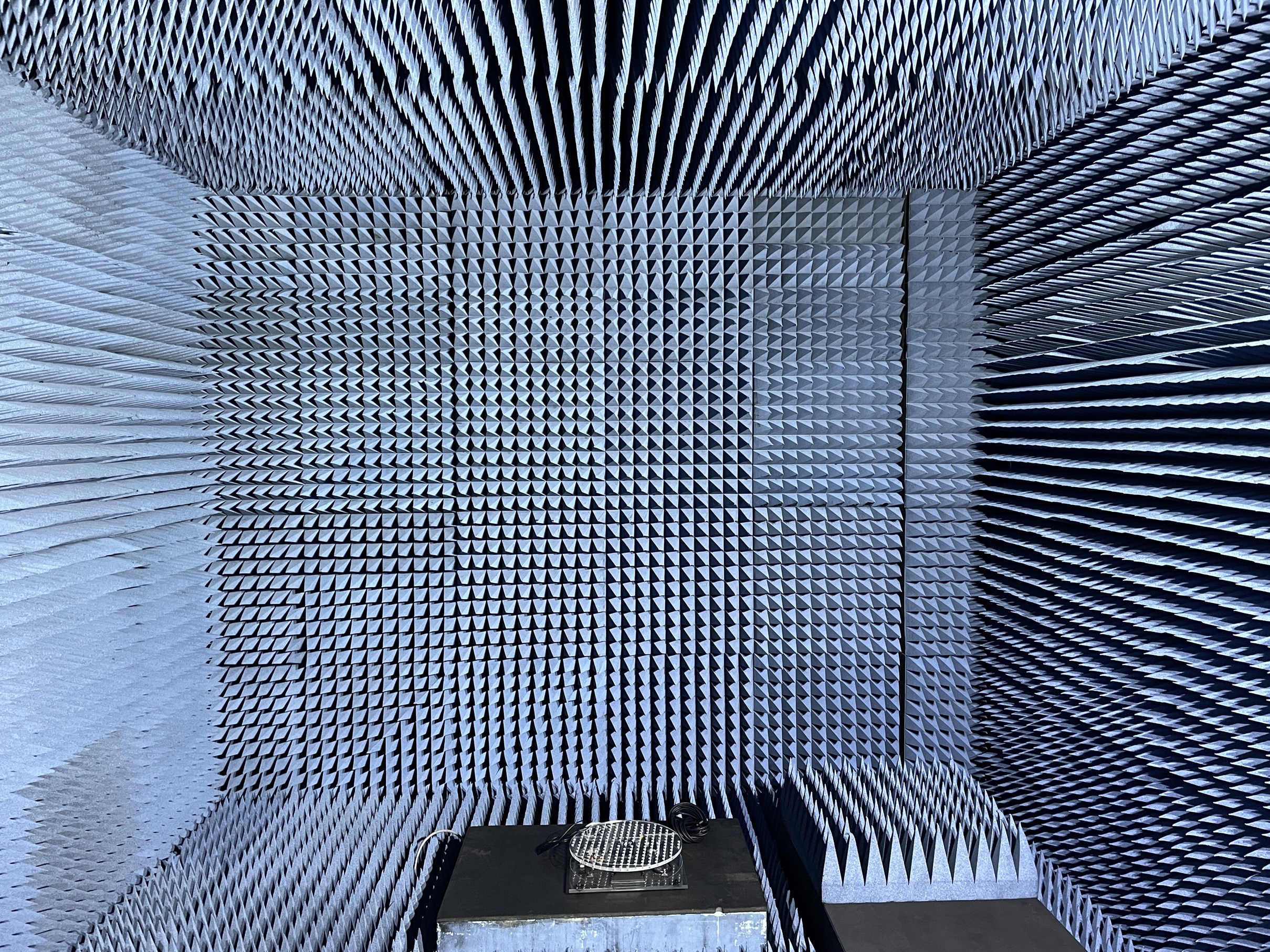
電波暗室とは電波の反射を低減する電波吸収体を壁や床・天井に敷き詰めた部屋のことです.電波にとっては,あたかも無限に広い空間が広がっている状況を作り出すようなイメージです.アンテナ測定やレーダでは不要な反射をできるだけ低減させたうえで実験を行うことが望ましく,その際にこの電波暗室が活躍します.当研究室では内部の空間が奥行3.7 m,横幅3.0 m,高さ2.3 m程度の簡易的な電波暗室を保有しています.背が高めの人が歩行路用ブロック(写真の黒色の部分)の上に余裕で立てる高さがあります.利用している電波吸収体は私(渡邉)が前職の富士通システム統合研究所に勤務していた時に会社の電波暗室を廃棄することになり,譲渡いただきました.電波暗室の壁に接着剤で張り付いている電波吸収体を仕事が終わった後にスクレーパーでせっせと剥がしていたのを思い出します.
HP 8510Cベクトル・ネットワーク・アナライザ

ベクトル・ネットワーク・アナライザ(Vector Network Analyzer: VNA)とはアンテナや高周波回路の周波数特性を測定するのに用いる測定器ですが,当研究室では専らレーダの送受信機として使用しています.当研究室で保有するHP 8510Cは30年以上前(1985年発表)に購入された古い機器ですが現在も大切に使用しており,まだ現役で稼働しています.50 GHzまでの周波数で測定が行えます.様々な中心周波数・帯域幅で信号処理アルゴリズムの実験検証が行えるため,研究では大変重宝します.簡易電波暗室とともに,当研究室の主要な研究設備となります.
ポータブルネットワーク・アナライザ
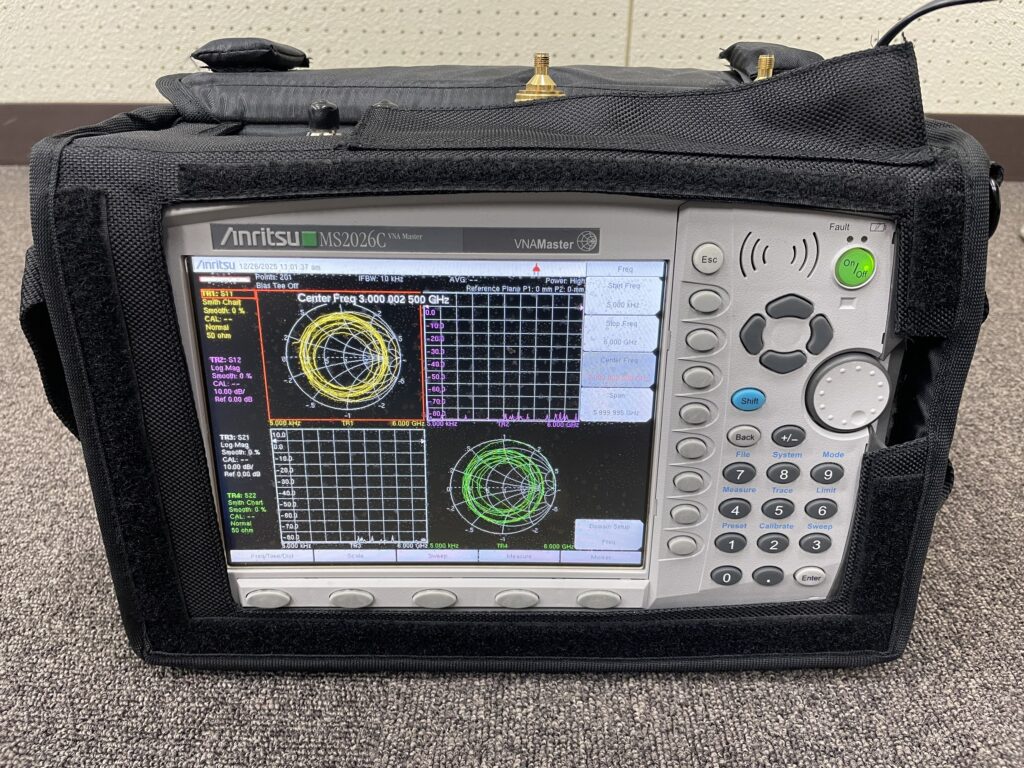
AnritsuのポータブルネットワークアナライザVNA Master MS2026Cです.6 GHzまでの周波数で測定が行えます.実験室以外にも様々な場所に持ち運んで測定が行えるので便利です.
ポータブルスペクトラムアナライザ
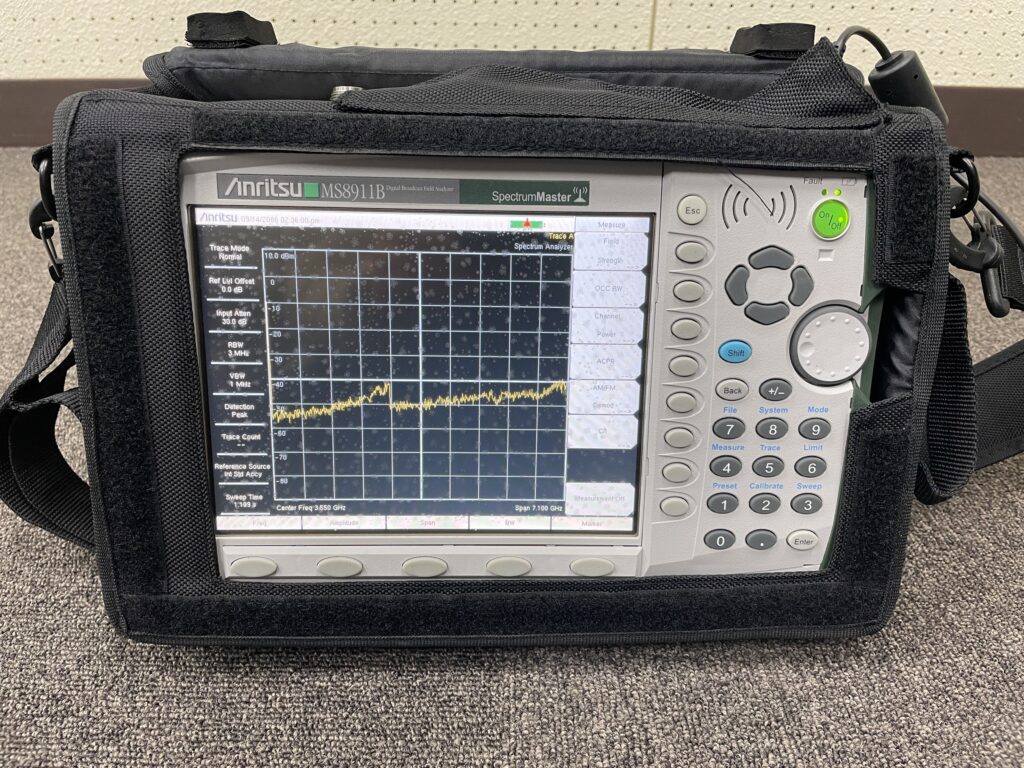
AnritsuのポータブルスペクトラムアナライザMS8911Bです.スペクトラムアナライザは電気信号や電波を周波数ごとに分解し,どの周波数にどれくらいの強さの成分が含まれているかをグラフで可視化・分析する測定器です.本製品は元々地上デジタル放送の信号を測定・解析するデジタル放送フィールドアナライザと呼ばれる機器なのですが,当研究室ではスペクトラムアナライザとしてのみ使用しています.7 GHzまでの周波数で測定が行えます.ポータブルネットワークアナライザ同様,実験室以外にも様々な場所に持ち運んで測定が行えます.
ベンチトップアンプ

Shanghai AT Microwave社製のベンチトップアンプ(型番:AT-BTBB-0043-3520)です.信号を増幅するのに用いるもので,当研究室では主にネットワークアナライザを利用する電磁波散乱測定で受信信号を増幅する目的に利用しています.10 MHz~43 GHzまでの周波数範囲で,35 dBの利得です.その他,主要な諸元は下記のとおりです.
| 項目 | 最小値 | 代表値 | 最大値 |
|---|---|---|---|
| 周波数 | 10 MHz – 43 GHz | ||
| 利得 | 33 dB | 35 dB | |
| P1dB | +18 dBm +16 dBm | 10 MHz – 33 GHz: +20 dBm 33 – 43GHz: +18 dBm | |
| Psat | +20 dBm +17 dBm | 10 MHz – 33 GHz: +22 dBm 33 – 43 GHz: +20 dBm | |
| 電源 | +90 V | +220 V | +240 V |
| 消費電力 | 40 W | ||
| NF (1 – 40 GHz) | 6 dB | ||
| 入力リターンロス | -5 dB | -10 dB | |
| 出力リターンロス | -5 dB | -10 dB |
産業用ドローンDJI Matrice 350 RTK

DJI Matrice 350 RTKは産業用の比較的大型なドローンで,当研究室では2台保有しています.2 kg程度までのペイロードであれば積載が可能で,ミリ波レーダ装置を搭載したレーダ観測の実験に用いています.また,RTK-GNSSと呼ばれる技術により,センチメートル単位の精密な測位が可能です.写真右側がドローン本体,左側の三脚に固定されているものがRTK-GNSS測位を実現する基準局(D-RTK2)とGNSSローバー(FJD Trion V10i)です.
ドローン搭載合成開口レーダ
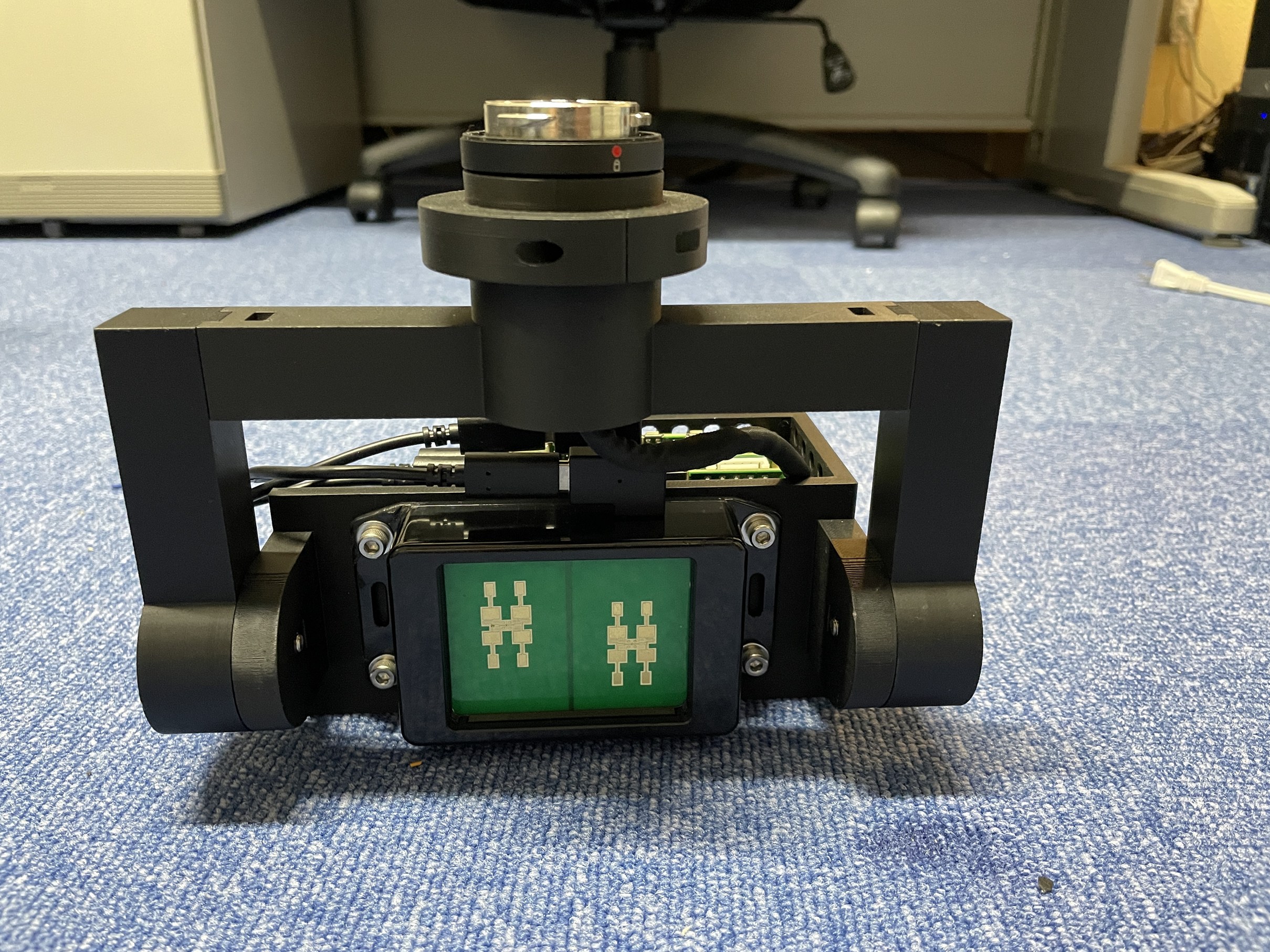
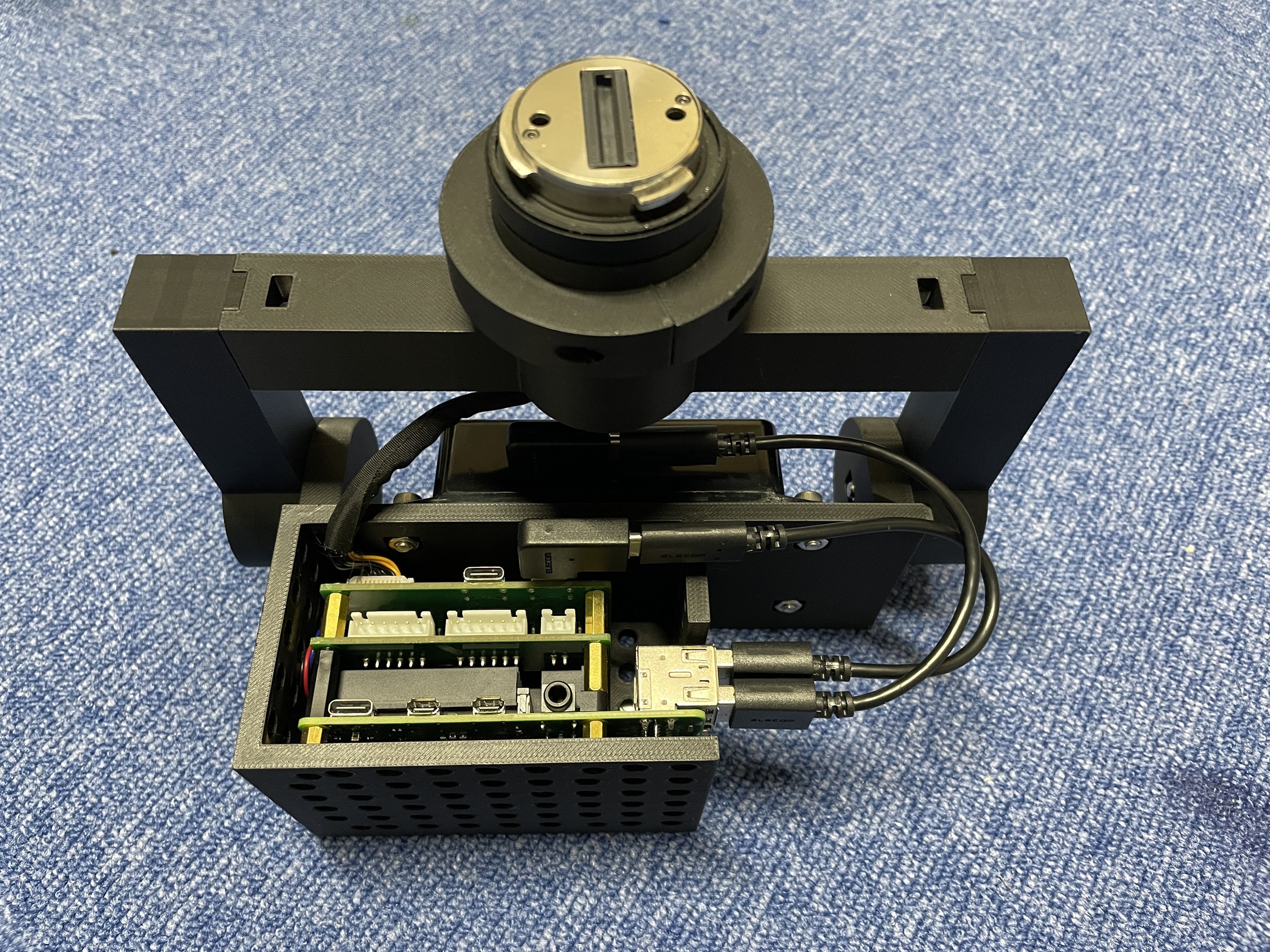
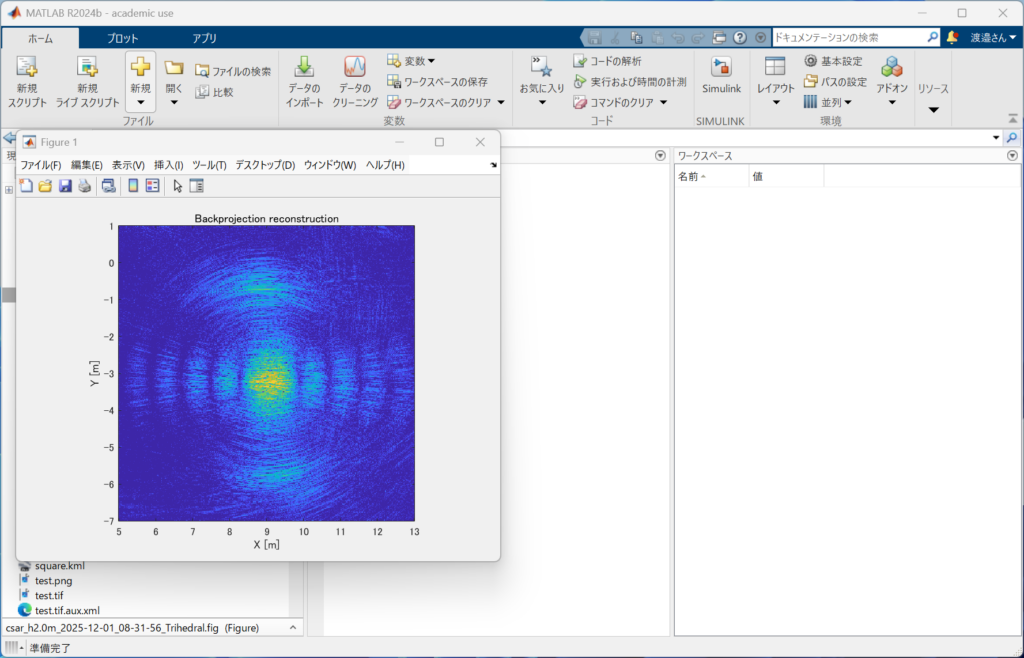
当研究室で開発しているドローン搭載合成開口レーダ(Synthetic Aperture Radar: SAR)です.レーダにはPTM社の24 GHz帯ミリ波FMCW(Frequency Modulated Continuous Wave,周波数変調連続波)レーダを使用し,制御部分にはRaspberry Pi 4 Model Bを使用しています.なお,レーダ部分はこれ以外のレーダでも自由に変更可能です.ドローンとRaspberry Piを接続するための拡張基板はKiCadを用いて設計し,レーダとRaspberry Piを収容する筐体は3Dプリンタで製作しました.ドローン搭載のSARは現在様々な研究グループで研究開発が行われていますが,本システムの最大の特徴はDJI社のドローン用SDKであるPayload SDKを使用し,産業用ドローンMatrice 350 RTKと統合した運用が行えることです.これにより,追加のRTK-GNSSアンテナを使用せずにセンチメートルレベルの精密な測位情報が機体から得られ,同様に機体の姿勢情報(ロール・ピッチ・ヨー)も取得できます.また,レーダの送信開始・停止指示も手元のコントローラから簡単に行えるようになっています.
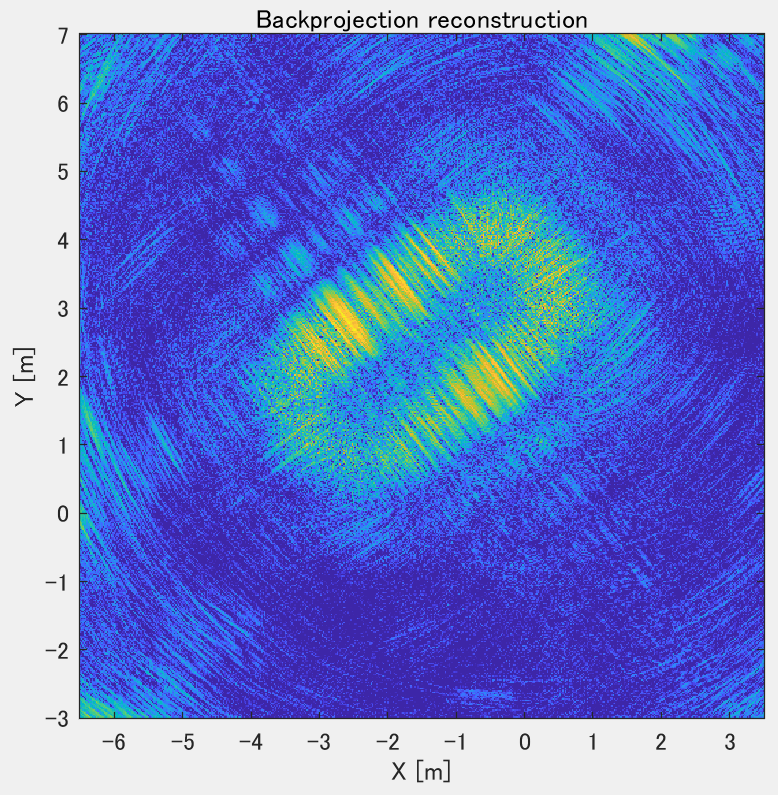
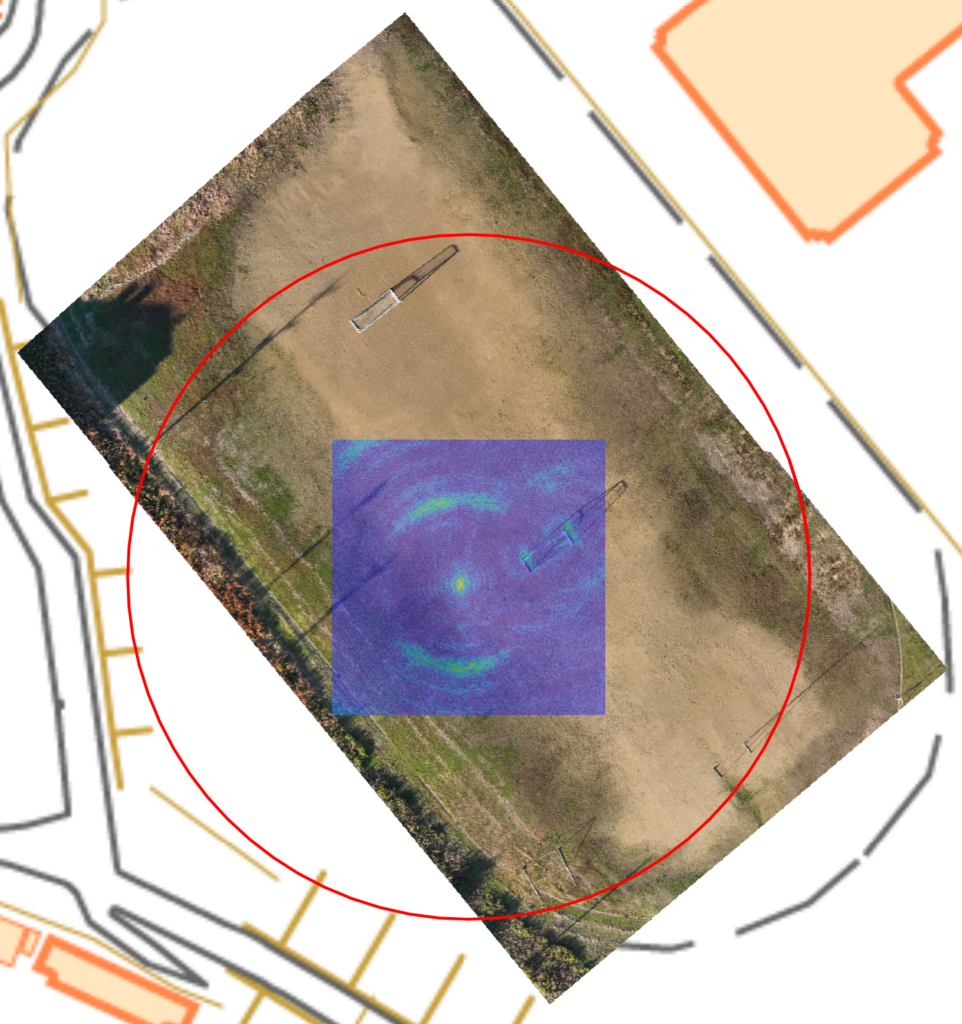
本システムを用い,現在円軌道合成開口レーダ(Circular SAR)による撮像実験を行っています.上記の画像は自動車の周囲をドローンで周回し,レーダ画像を生成した例です.詳細については今後本Webサイトの記事や学会にて発表していく予定です.
ドローン搭載LiDAR

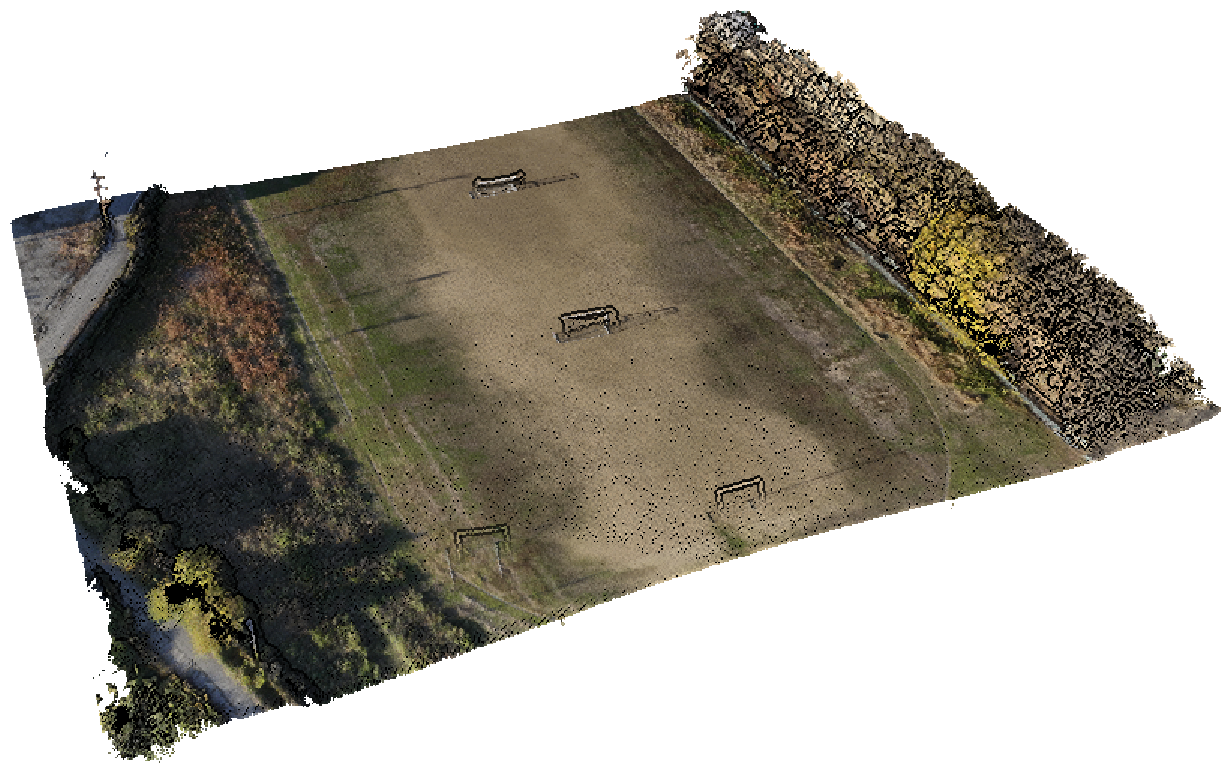
点群データ(RGB)
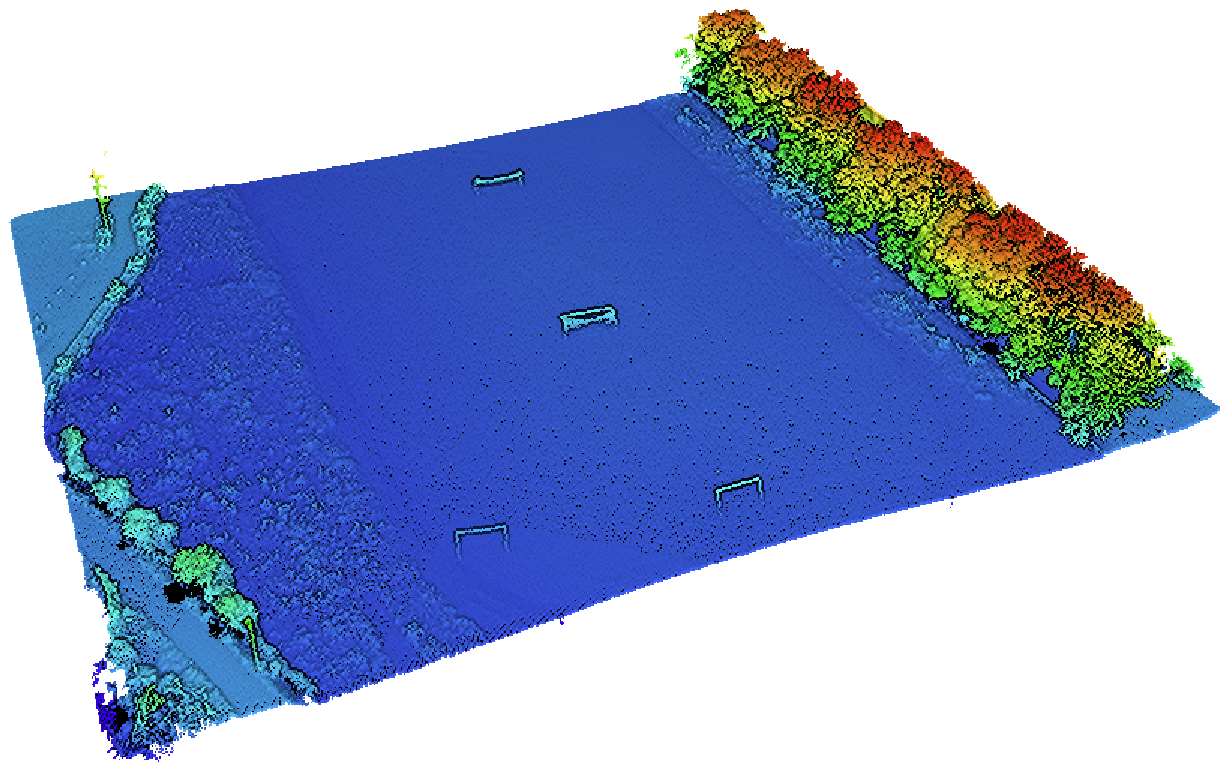
点群データ(標高)
DJI社のドローン搭載LiDAR Zenmuse L2です.上記画像のようにドローンから地形や構造物の三次元情報(点群データ)を取得したり,航空写真を撮影したりすることができます.お値段はなんとドローン本体よりも高額です.
上記の画像のように,当研究室で開発しているドローン搭載合成開口レーダ(Synthetic Aperture Radar: SAR)で取得した画像と本LiDARで取得した点群データを組み合わせれば,どの場所からレーダの応答が返ってきたのかを簡単に特定することができます.今後のレーダの実験では大変重宝しそうですし,LiDARデータとレーダデータを統合した画像解析など,色々とできることが広がりそうです.
各種ホーンアンテナ

電波を空間に放射し,また到来した電波を受け取るのがアンテナの役割です.1 GHz程度から40 GHz程度まで,様々なホーンアンテナを保有(写真は一部借用品)しています.アクリル製の治具は下に示す卓上CNCフライス盤Kitmillを用いて自前で加工したものです.
各種コーナリフレクタ
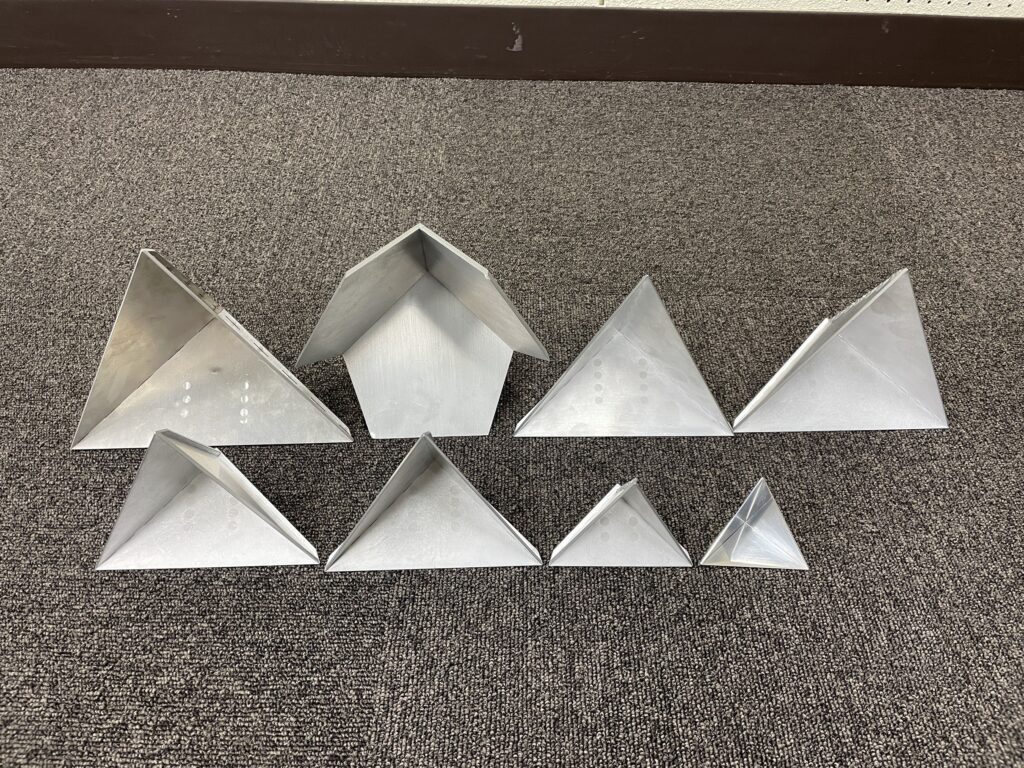
コーナリフレクタは写真のように金属の平板を直角に組み合わせたもので,電波を強く,かつ入射方向と同じ方向へ反射することから,レーダの実験で目標物(ターゲット)として用いたり,レーダ散乱断面積(Radar Cross Sectoin: RCS)の理論値が簡単に計算できることから,RCSの測定における基準ターゲット(校正ターゲット)として用いたりします.写真のように三面の平板を組み合わせたものを三面コーナリフレクタ(Trihedral)といい,二枚の平板を組み合わせたものを二面コーナリフレクタ(Dihedral)といいます.開口面(リフレクタの口が開いている側)から電波を照射したとき,前者は送受で偏波が同じになりますが,後者はリフレクタの角度によって送受で偏波が異なるという性質があります.実は私たちの身近にも似たような構造が存在し,それが道路にある反射板です.反射板を拡大してみると鏡で出来た小さな三面コーナリフレクタがたくさん並んでおり,これによりある程度どの方向から車のライトで照らしたとしても同一方向に反射が起こり,ドライバーからよく見えるようになっています.
RCS測定用模型

レーダ散乱断面積(Radar Cross Sectoin: RCS)の測定に用いる航空機模型(株式会社日南製)です.Kratos XQ-58 Valkyrieという無人機を模したものになっており,実機の1/20スケールと1/40スケールの模型があります.写真左側の模型は樹脂製の模型に導電性の塗料(銅の粉末を含んだ塗料)を塗布して製作したもので,金属製と同等の模型を安価に製造できることを実証するためのものです.これらの模型は3D CADモデルをもとにCNCにより精密加工したもので,数値電磁界解析によるRCSの計算結果と測定結果とを比較でき,RCS測定法の評価に用いることができるようになっています.一点物の高価な模型なので,慎重な取り扱いが求められます.(写真右側の大きな金属製模型は,某宅配業者が模型が梱包された箱を輸送中に落下させて一部曲がってしまいましたが,日南さんの加工技術できれいに修復していただきました.宅配便は放り投げられると思って厳重な梱包が必要です.)
ミリ波レーダ装置
車載レーダなどで利用されるものと同等のミリ波レーダ装置です.当研究室ではPTM社・サクラテック社の24 GHz/79 GHzミリ波レーダ装置を保有しています.小型なため,ドローンや台車ロボットに搭載してレーダ観測実験を行うことが可能です.
RTK-GNSS基準局
工学部電気棟の屋上に設置してあるRTK-GNSSの基準局です.RTK-GNSSは緯度経度が既知の基準局と実際に測位を行いたい移動局の二つが必要ですが,このうちの基準局の役割を果たすものです.本基準局にはインターネット回線を介してアクセスすることができ,移動局を携帯電話のテザリングなどでインターネットへ接続し,この基準局から測位情報を受け取ることで,センチメートル単位の測位を実現します.
本基準局の開設は学内での手続きや屋上のネットワーク配線工事など,技術面以外の部分で結構苦労しました.
台車ロボット メガローバーF120

ヴイストン株式会社製の研究開発用台車ロボット メガローバーF120です.120 kgまでの積載量に耐えることができ,レーダをはじめとして様々なセンサや制御用PCなどを搭載して走行実験が行えます.台車前後にレーザ距離計(Laser Range Finder: LRF)を搭載し,SLAM(Simultaneous Localization and Mapping, 自己位置推定とマッピングの同時実行)による台車ロボットの自己位置推定と環境地図作成が同時に行えます.本台車ロボットを用い,現在車両搭載型の合成開口レーダ実験を計画しています.

台車ロボットにリニアガイドとレーダを搭載してみました.これでレーダの高さを変更しながら走行することができ,三次元のレーダ画像生成を目指して現在実験を行っています.
実体顕微鏡HOZAN L-46
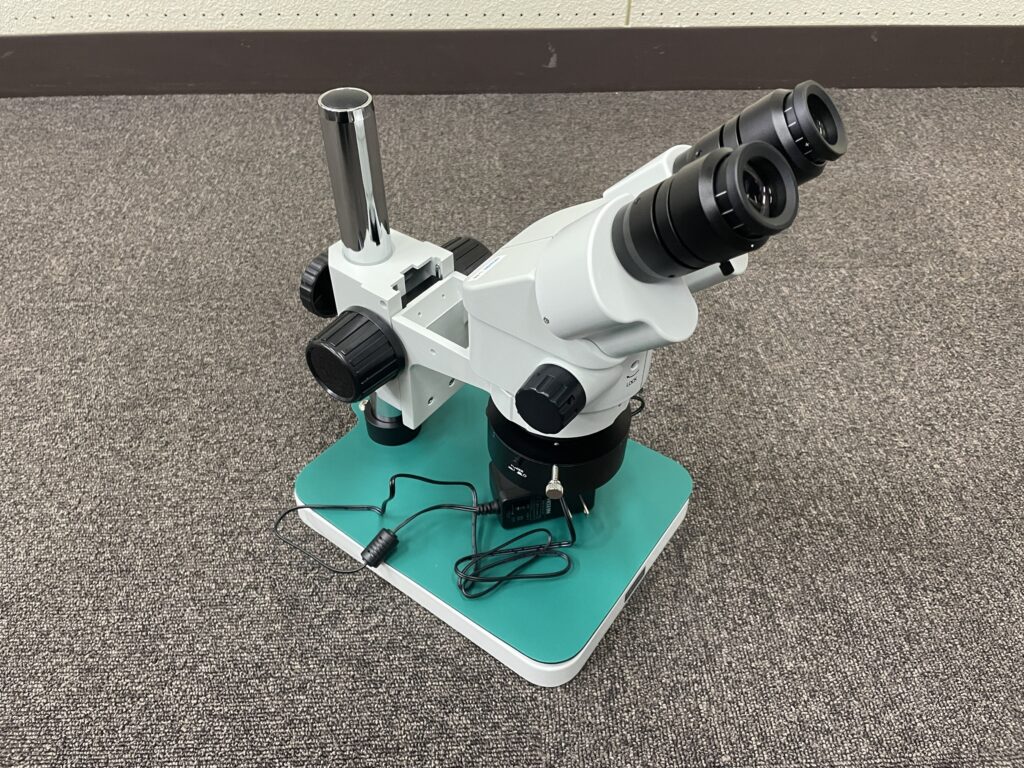
精密作業を行うのに使用する実体顕微鏡HOZAN L-46です.7~45倍までの倍率に対応しています.
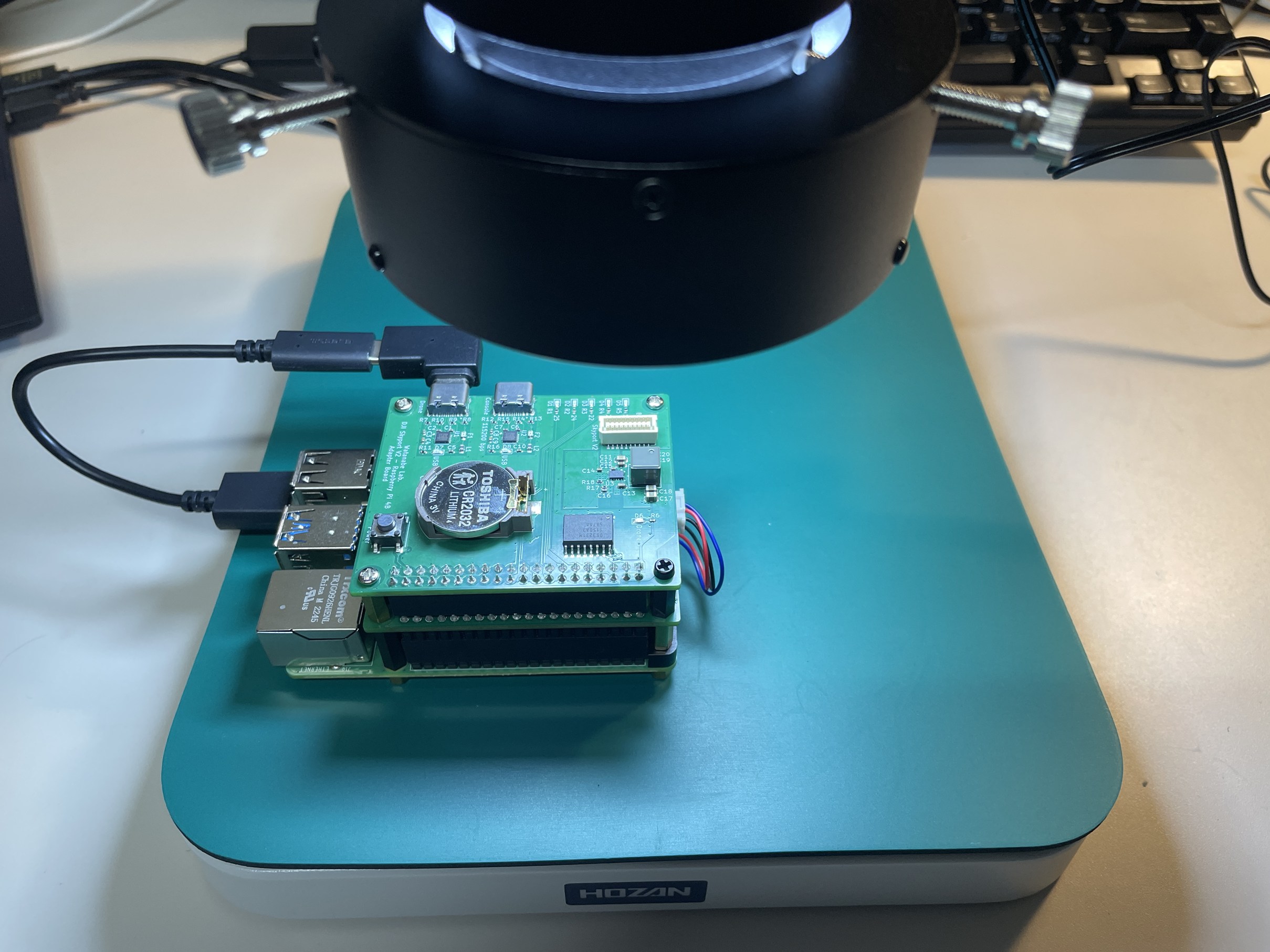
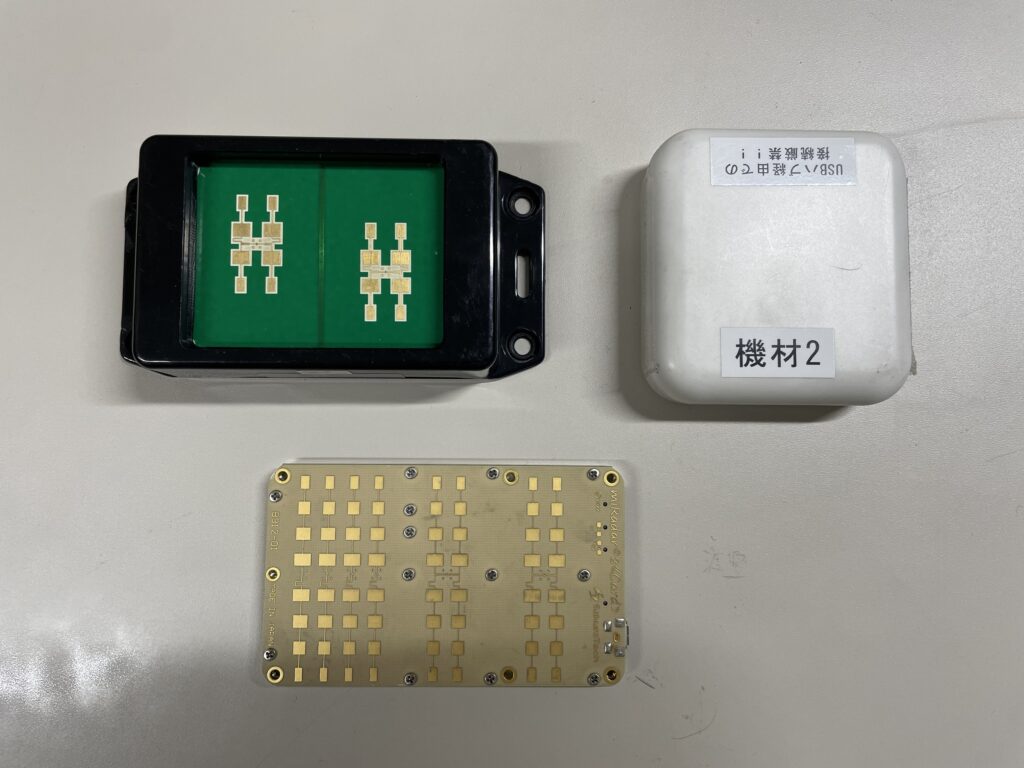
レーダ制御基板の観察
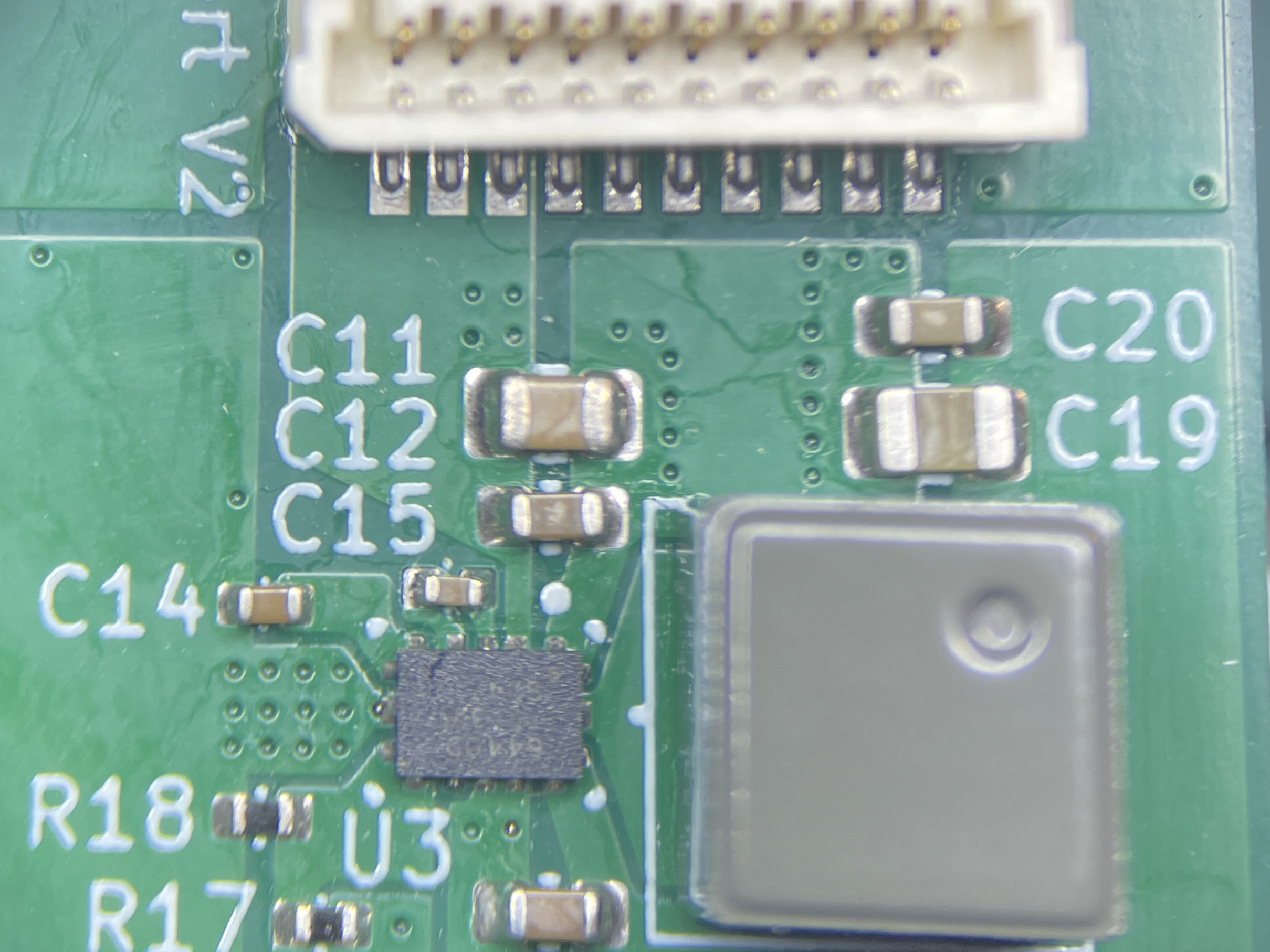
顕微鏡画像
ドローン搭載合成開口レーダの制御基板(Raspberry Pi拡張基板)を観察してみました.顕微鏡画像はドローンのバッテリーから供給される電圧をRaspberry Piの動作電圧まで降圧するスイッチングレギュレータ部分です.部品の実装ははんだペーストを基板に塗布してホットプレートで溶融させる方法をとっているので結構な確率ではんだ不良が発生します.肉眼ではどの部分が不良かわかりづらいですが,実体顕微鏡であれば基板上の埃の形までわかるので,はんだ不良の発見や手直しなどが非常にやりやすくなりました.
測定用ターンテーブル
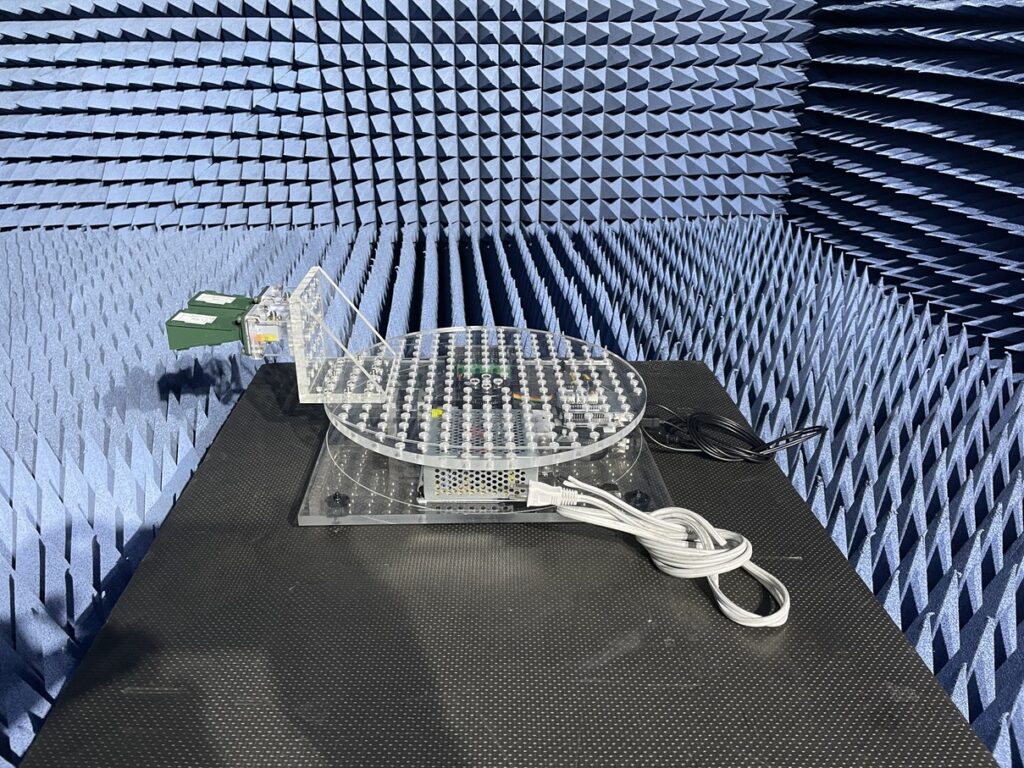
電動で動作する回転台です.以下で紹介している卓上CNCフライスKitmillによるアクリル板加工と制御用マイコンボードのArduino,中国製の安価な回転ステージを用いて自作したものです.0.01°程度の角度分解能は実現できるようです.アンテナ測定用の電動回転台は購入すると大変高価(100万円以上)なものですが,このように自作すれば5万円以内で済みます.制御用のArduinoファームウェアとMATLABによる制御ソフトは学生が作ってくれました.少しでも電子工作ができると,このような色々な実験器具の製作を業者に頼まずとも自分たちで出来るようになって楽しいですし,お金も節約できます.
※写真はアンテナ回転式合成開口レーダ(Rotational Synthetic Aperture Radar: RoSAR)実験用にアンテナを固定した状態です.ターンテーブルに一定間隔で穴が開いており,色々なアタッチメントを接続できるようになっています.
電動リニアガイド
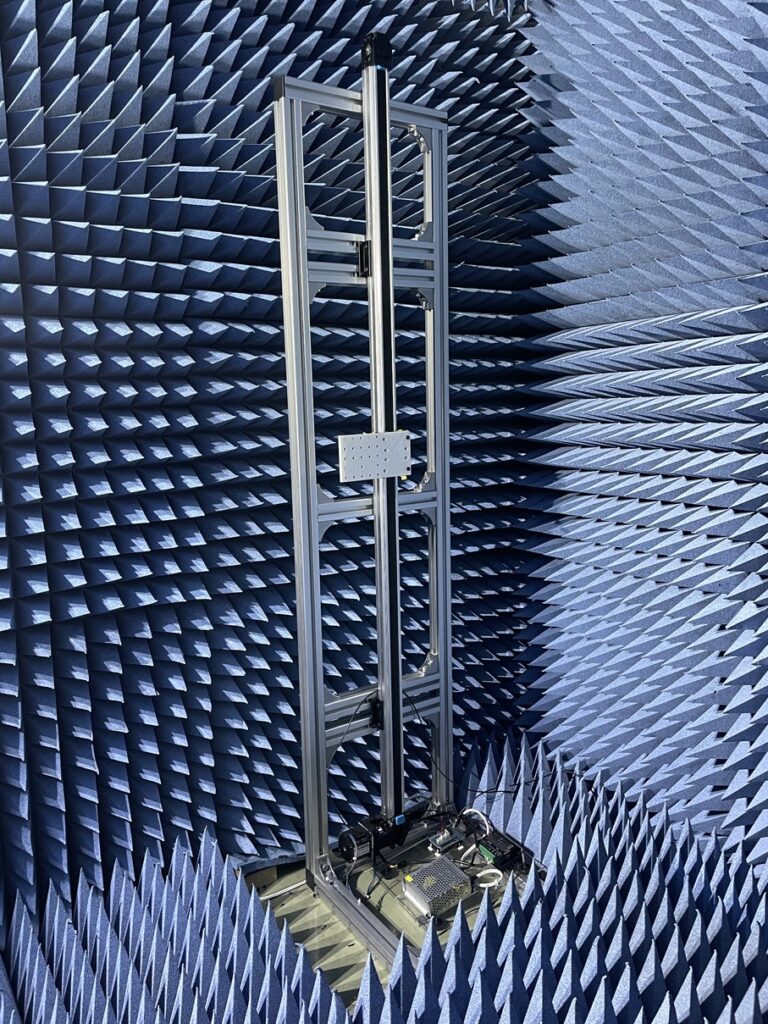
リニアガイドとはモーターの回転を直線的な運動に変換する機構のことです.上記写真はリニアガイドを利用した電動の昇降装置です.アンテナやレーダ装置を固定し,様々な高さから電波の送受信を行うのに用います.こちらも回転台と同様,中国製の安価なリニアガイドをアルミフレームに固定して自作したもので,制御はArduinoです.これを回転台と組み合わせて動作させると,円筒状のアンテナ走査が実現できます.
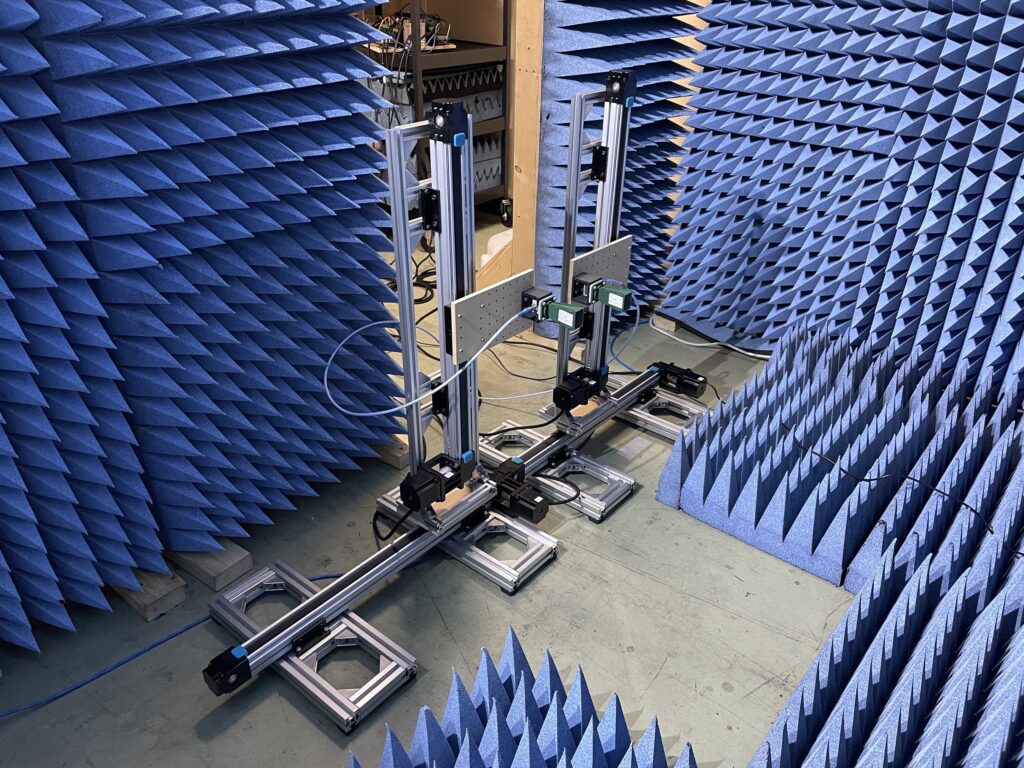
上記写真はリニアガイドを組み合わせて製作したX-Yスキャナです.平面上でのアンテナ走査を実現できます.上記写真では2セットのX-Yスキャナが置いてあり,それぞれ独立した動作が行えます.これにアンテナを固定してネットワークアナライザと接続し,疑似的なMIMO(Multiple-Input Multiple-Output)レーダの実験を行っています.
卓上CNCフライス盤Kitmill CL420
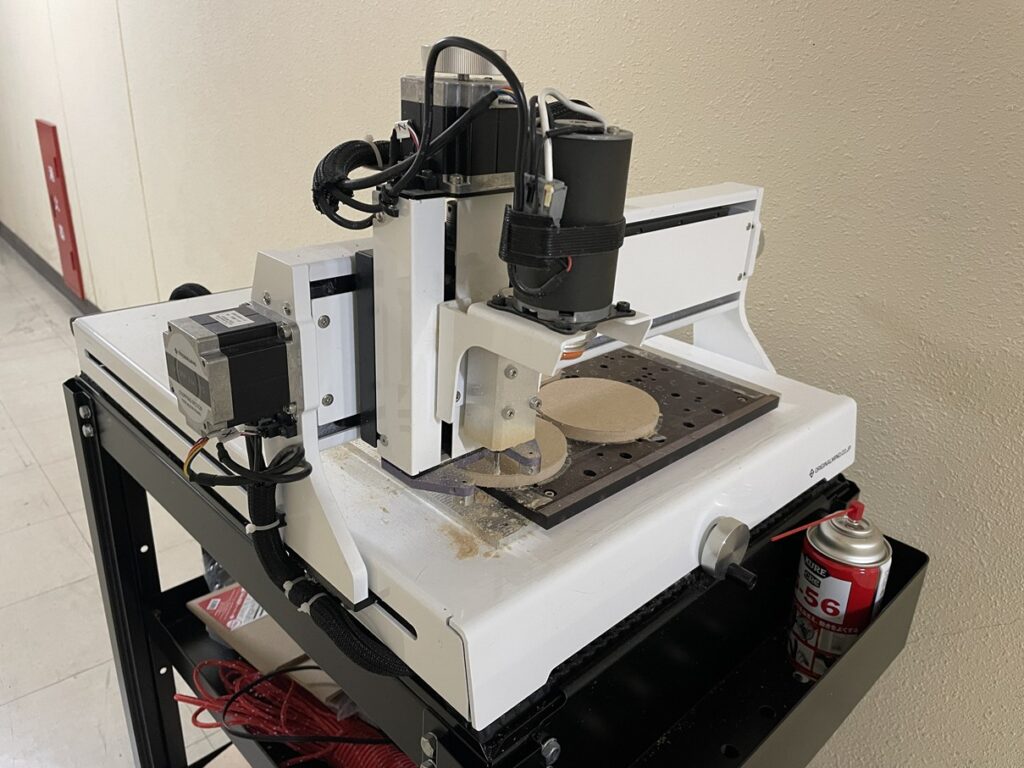
CNCフライスとはコンピュータで制御された回転工具により,設計した通りに板などを削り出す工作機械です.実験に用いる各種治具の製作に利用します.富山大学では大学内にある機械工場に部品の加工を依頼することも可能ですが,卓上CNCフライス盤ではちょっとしたアイディアをすぐに形にでき,設計変更も容易なことが強みです.当研究室ではオリジナルマインド社のKitmill CL420を保有しています.
FDM方式3DプリンタBambu Lab P1S

Bambu Labの3DプリンタP1Sです.造形方式は熱溶解積層(Fused Deposition Modeling: FDM)方式と呼ばれ,半液状に溶かした熱可塑性プラスチック材料を一層ごとに積み重ねて造形を行う,3Dプリンタでは最も一般的な方式です.さらに,このプリンタではAMS(Automatic Material System)と呼ばれる機能を搭載しており,マルチカラー出力に対応しています.以前はCrealityのCR-10 Smart Pro(2022年6月発表)という製品を使っていましたが,その頃の3Dプリンタと比較すると進歩に驚かされます.造形が速いうえにきれいで,クラウド経由で3Dモデルをプリンタへ送信できるのでどこからでも印刷が開始できます.

造形の精度はCNCフライスほど高くないものの,扱いが簡単でCNCフライスと同様に実験に用いる治具を製作するのに利用しています.上記の写真はドローン搭載合成開口レーダのための治具です.このように複雑な形状を作成する場合も3Dプリンタのほうが圧倒的に簡単です.
85インチ大型モニタ
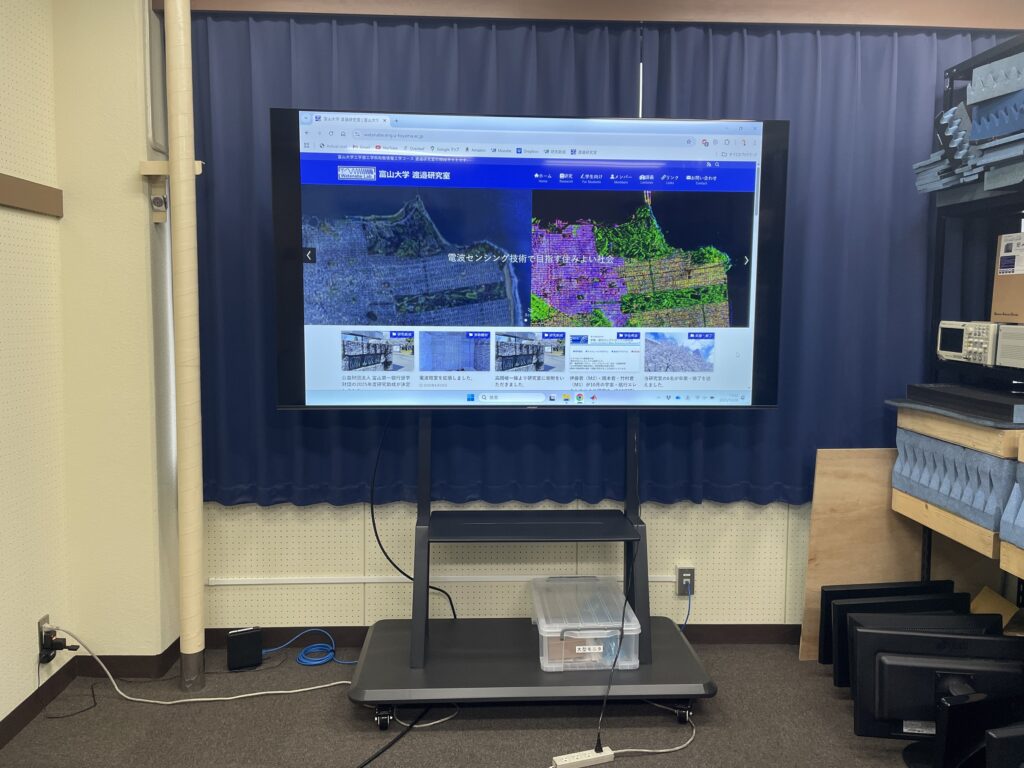
JAPANNEXTの85インチ大型モニタJN-V85U-Mです.ミーティングや進捗報告でスライドや資料を映すのに用いています.以前は古いプロジェクタを使用していましたが,部屋を暗くしないといけない,解像度が低く文字が見えにくいなど不満点が多かったので,思い切って大型モニタを導入することにしました.
ソフトウェア関係
研究で使用する主なソフトウェアです.
MATLAB
信号処理アルゴリズムは基本にMathWorksのMATLABで実装しています.その他はドローンやレーダ,台車ロボットの制御にC/C++を使用しています.富山大学の教員や学生であればだれでも使用可能です(研究室で購入・維持しなくてよいのはありがたいです).
Altair FEKO
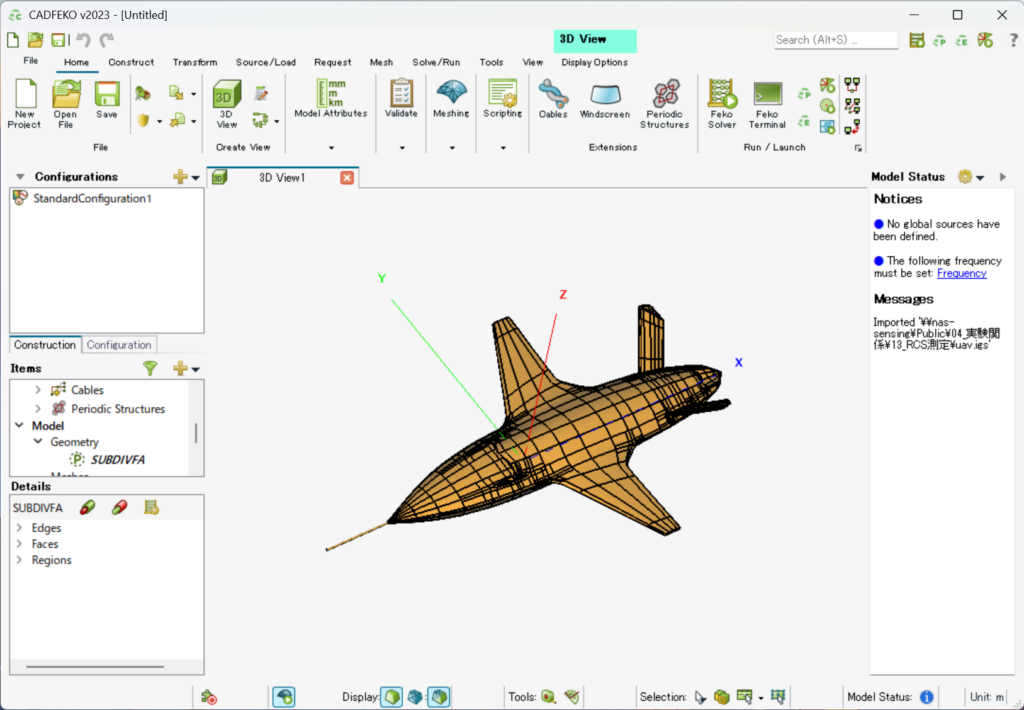
電磁界シミュレーションソフトです.現状は主にRCS測定の参照解を出力するのに使用しています.
Rhinoceros
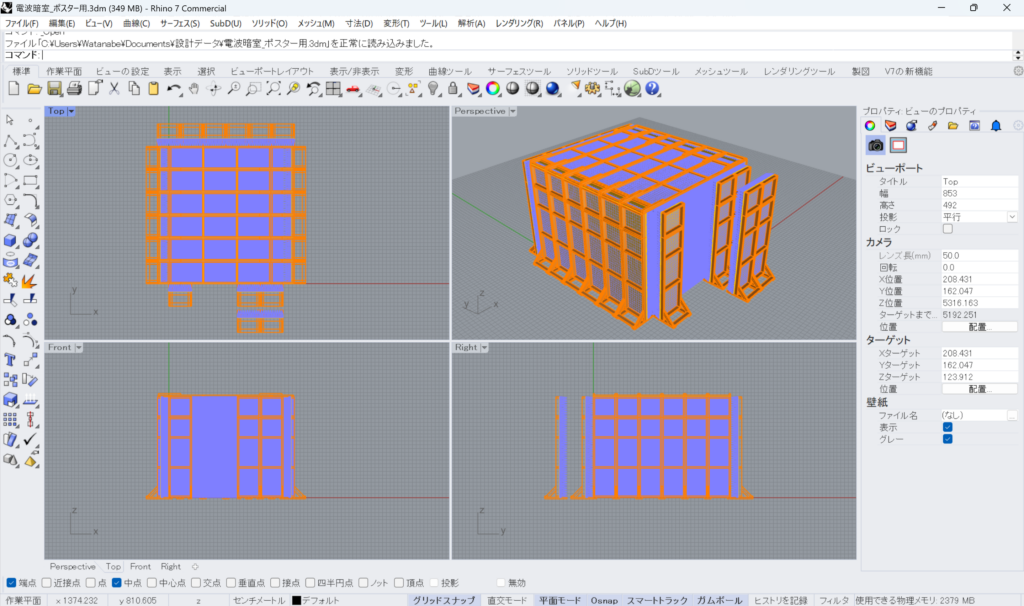
3D CADソフトです.3Dプリンタでの出力やCNCフライスでの加工を行うための3Dモデルを作成するのに用います.電波暗室もRhinocerosで設計しました.