概要
当研究室では,電波を用いた画像の生成手法と解析手法について,理論と実験の両面から研究を行っています.主なキーワードとしては合成開口レーダ(Synthetic Aperture Radar: SAR)です.SARとは航空機や人工衛星などの移動するプラットフォームにレーダを搭載し,プラットフォームの移動により仮想的に大開口のアンテナを合成することで,観測対象の高分解能な画像を生成する技術です.当研究室ではSARのプラットフォームとして従来から用いられてきた航空機や人工衛星に加え,近年様々な分野で利活用が拡大するドローンや,小型の無人車両,無人ボートなど,様々な新しいプラットフォームにSARの技術を応用することを検討しています.
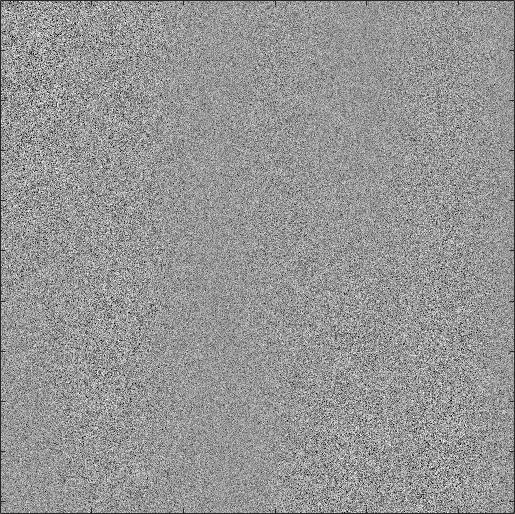
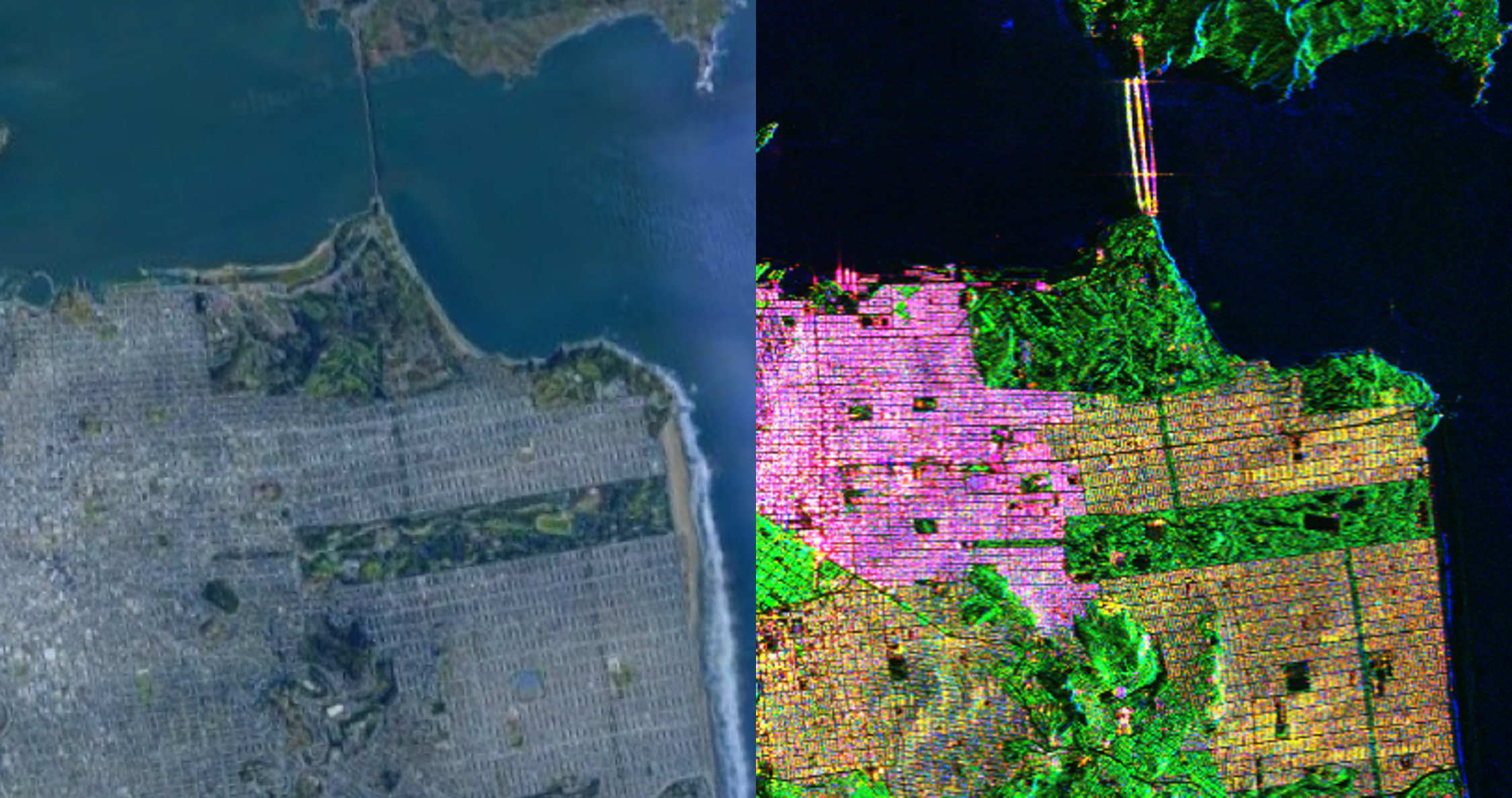
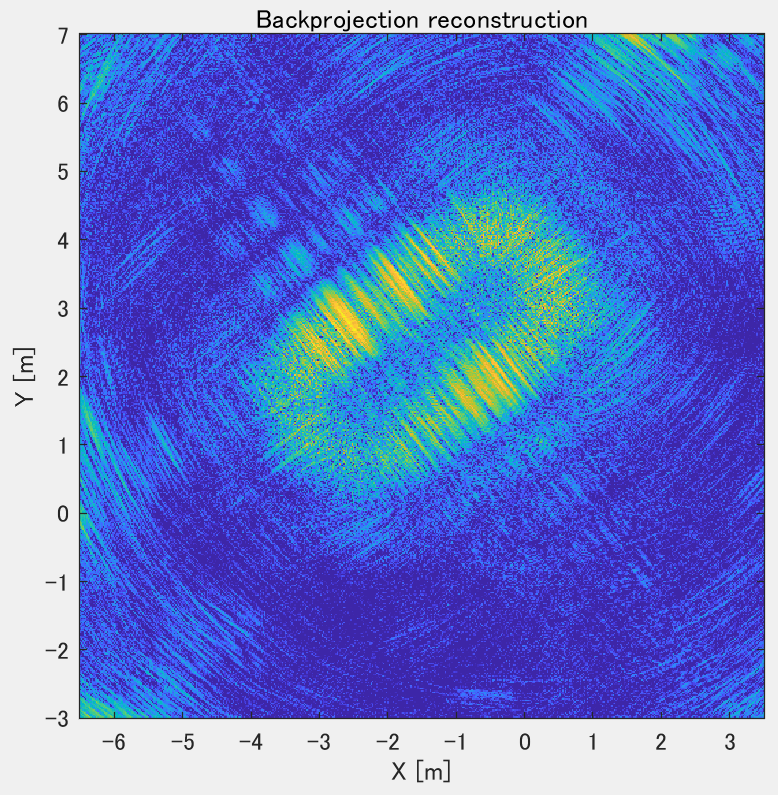
元々のレーダの受信信号
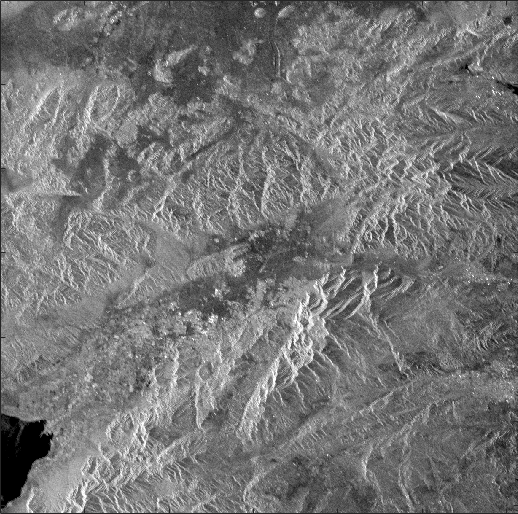
受信信号から生成したSAR画像
以下では当研究室で現在進めている主要な研究テーマについて解説します.
ドローン搭載SAR

研究室で保有するドローン(DJI Matrice 350 RTK)
SARのプラットフォームとしては一般的に人工衛星や航空機が用いられますが,近年ではドローンをプラットフォームとしたSARが盛んに研究されており,当研究室でも重要な研究テーマの一つとして位置づけ,ドローン搭載SARの研究開発を進めています.ドローンは機動的かつ変則的な飛行を行えることが大きな特徴で,これにより従来のプラットフォームでは難しかった様々な軌道でSAR観測が行えるようになります.例えば,ドローンを鉛直方向に飛行させて建造物のSAR画像を生成したり,ドローンを平面的に飛行させて三次元画像を再構成したり,あるいは球面的な走査など,もっと複雑な軌道を飛行してSAR画像を生成することも可能となります.
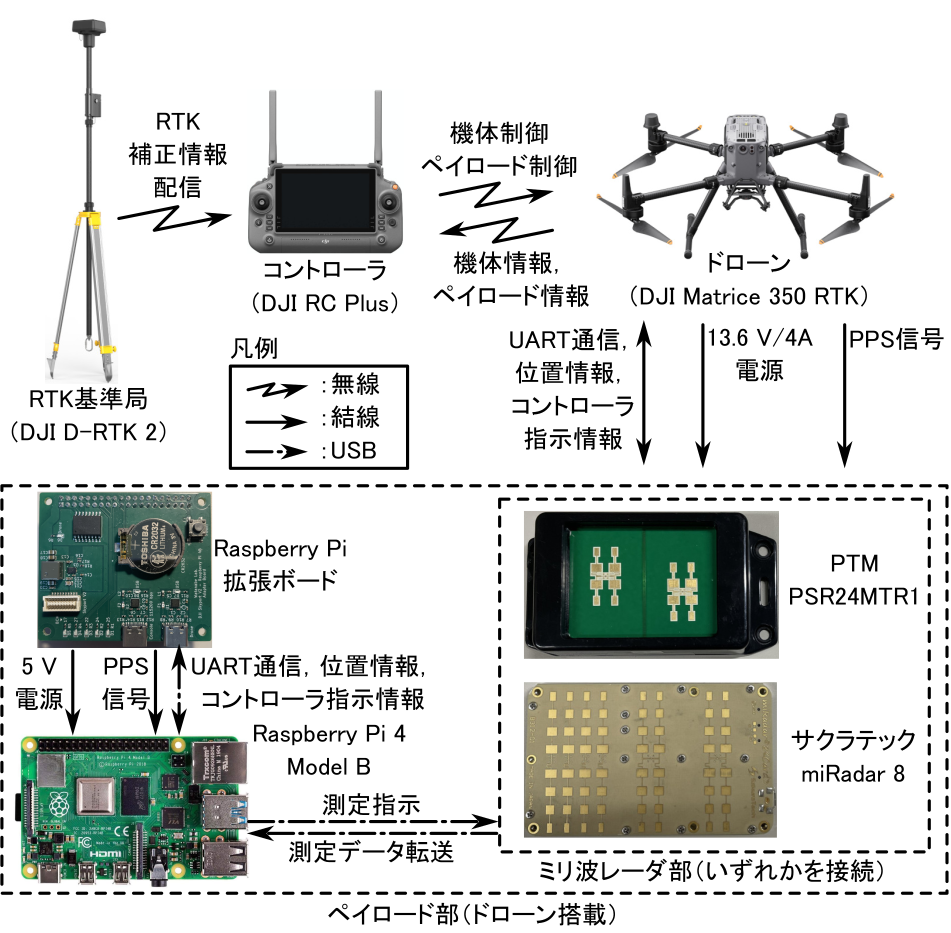
システム構成
当研究室では現在,24 GHz帯のミリ波レーダ・MIMOレーダをドローンに搭載したSARシステムの開発を行っています.上図にシステム構成を示します.ドローンにはDJI社の産業用ドローンであるMatrice 350 RTKを使用し,ドローンの精密な位置情報取得のため,RTK-GNSSとしてDJI D-RTK 2を使用しています.ドローンに搭載するミリ波レーダはPTM社の24 GHz FMCWレーダであるPSR24MTR1およびサクラテック社の24 GHz FMCW MIMOレーダであるmiRadar 8を使用しています.レーダの制御やドローンからのRTK-GNSS測位情報の取得にはシングルボードコンピュータであるRaspberry Pi 4 Model Bを使用し,ドローンの内蔵コンピュータとの通信を行うための拡張基板を組み合わせています.
上図は本システムで乗用車を観測したSAR画像の例です.
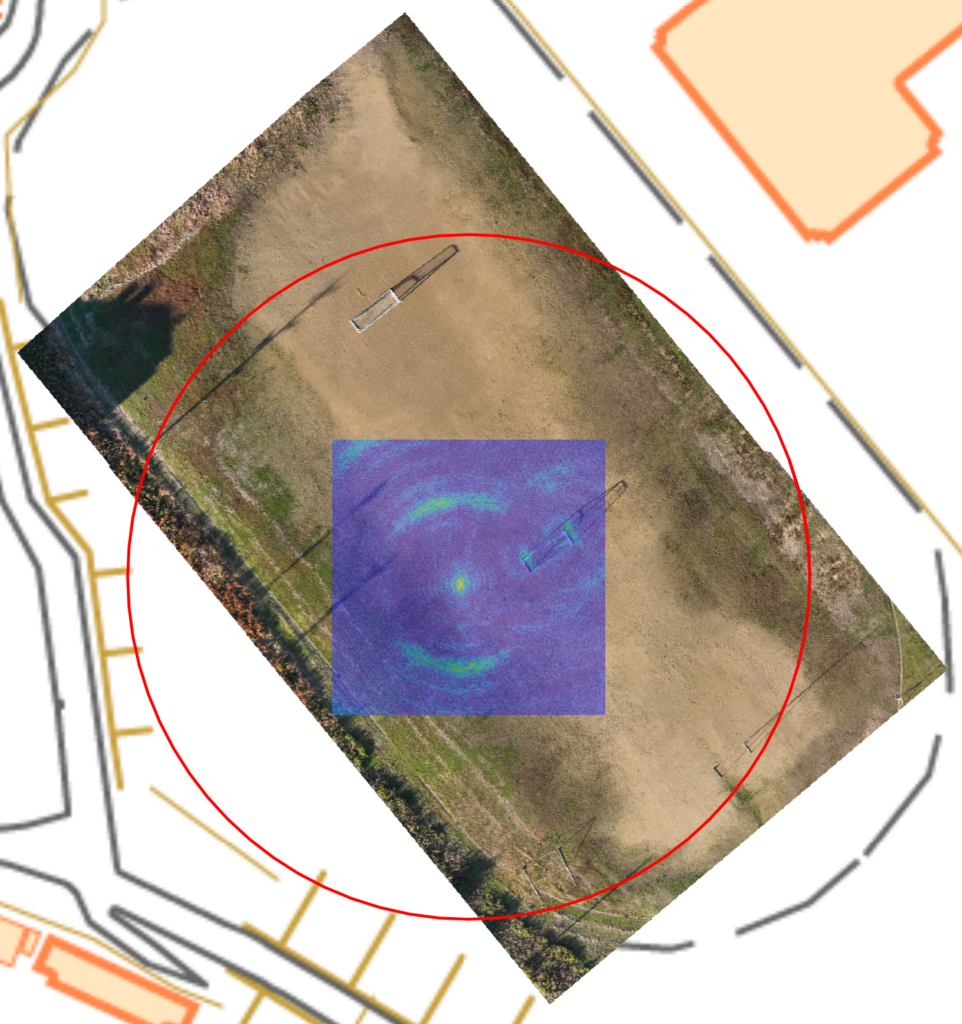
また,レーダだけではなく,LiDARと組み合わせた観測も実施しています.上記の画像はドローン搭載LiDARであるDJI Zenmuse L2で取得したオルソ画像とSAR画像を重ね合わせて表示した例です.上記の画像の赤線で示すようにドローンを円軌道で飛行させ,円の中心に目標物を置いてSAR観測を行いました.中心にある目標物からの強い応答と,グラウンド上に設置されたゴールからの応答がわかります.
ミリ波帯のSARで重要となってくるのがドローンの動揺補正や軌道推定アルゴリズムで,RTK-GNSSだけの位置精度ではうまくSAR画像が生成できません(それでも上記の画像は補正無しで何となく画像にはなっているのですが).現在はより鮮明なSAR画像の生成に向けて動揺補正アルゴリズムの開発を進めています.
円軌道合成開口レーダ(Circular SAR)
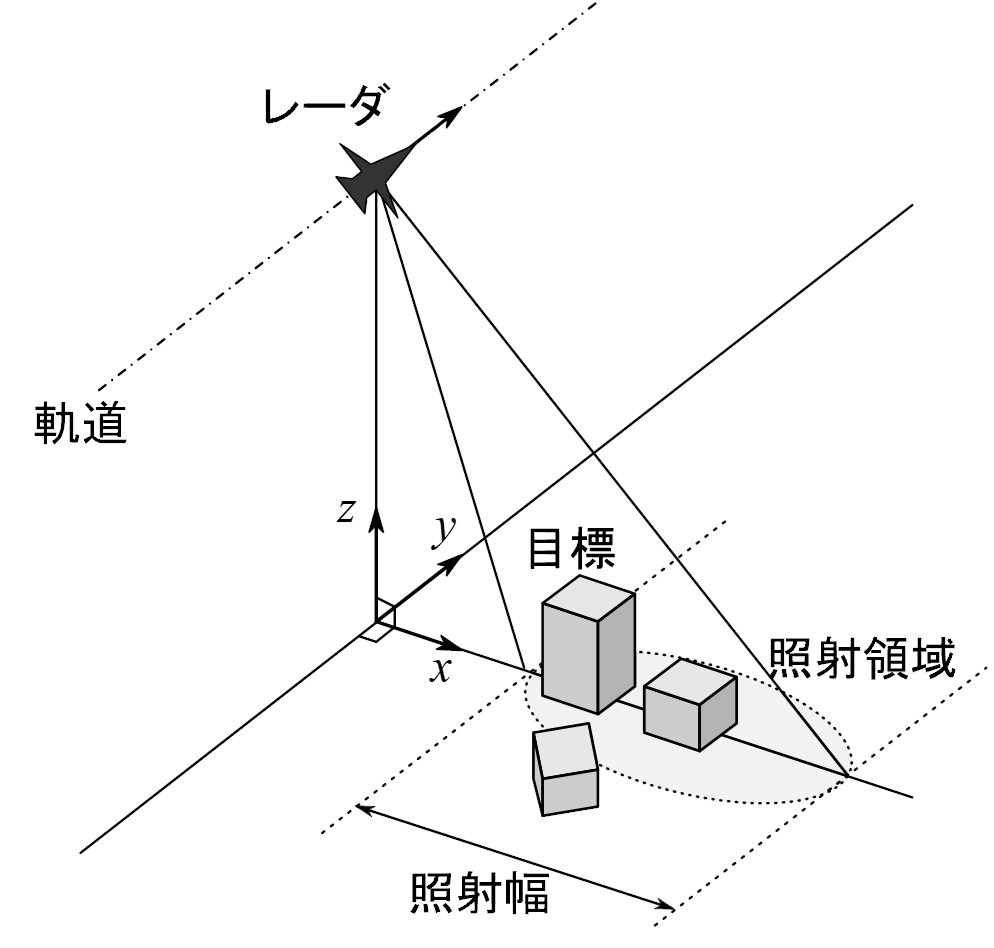
直線軌道SAR
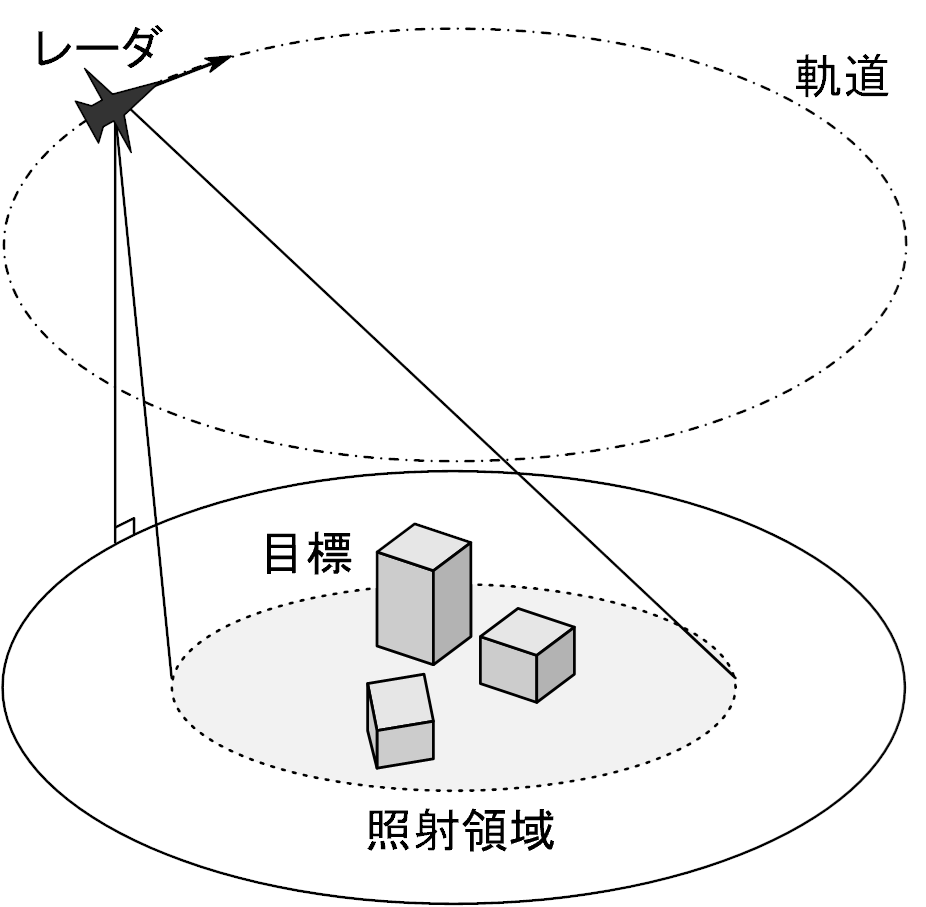
円軌道SAR
上の図のように,SARは通常,プラットフォームの直線的な移動を利用(直線軌道SAR)するものですが,当研究室で研究を進めている円軌道合成開口レーダ(Circular SAR: CSAR)は,プラットフォームを観測対象物を中心とした円形状に飛行させることでSAR画像の生成を行う技術です.
最近は二つのレーダ画像間の位相差を計算することで目標物の変位を測定する差分干渉解析(Differential Interferometry)と呼ばれるレーダ画像解析技術をCSARに応用し,土砂災害の兆候を検知することを目的とした研究を行っています.
アンテナ回転式合成開口レーダ(RoSAR)
CSARは目標物の周囲をアンテナが回転する方式ですが,ここで説明するアンテナ回転式合成開口レーダ(Rotating SAR: RoSAR)はある半径でアンテナが回転し,回転するアンテナ周囲の全方位を画像化するという方式です.要はCSARは円軌道の内側を画像化するのに対し,RoSARは円軌道の外側を画像化しようというアイディアです.例えばこの技術を無人車両に搭載すれば,夜間や悪天候でも周囲の障害物の位置を特定する技術が実現できます.
なお,本テーマはスズキ財団の2024年度研究助成に採択されています(下記の関連記事を参照).

小型無人車両搭載SAR
レーダ散乱断面積の測定(近傍界遠方界変換)

航空機模型のRCS測定の例(手前に見えるのは送受信アンテナ)
このテーマは他テーマと比べて専門性が高く,説明が難しくなります.レーダ散乱断面積(Radar Cross Section: RCS)とはレーダで目標物を観測したとき,レーダ波を目標物がどの程度反射するのかを表す指標で,レーダの分野では基本的かつ重要な物理量です.例えば車載レーダの分野では,自動車や歩行者からおおよそどれだけの強さの反射があるのかを知っておけば,その情報をレーダの送信電力やアンテナの設計に生かすことができるでしょう.防衛分野ではできるだけ自機のRCSを低減させ,相手方のレーダから発見されづらくする,いわゆるステルス技術が重要となりますが,このステルス性能の評価はまさにRCSを測定し,評価するということです.
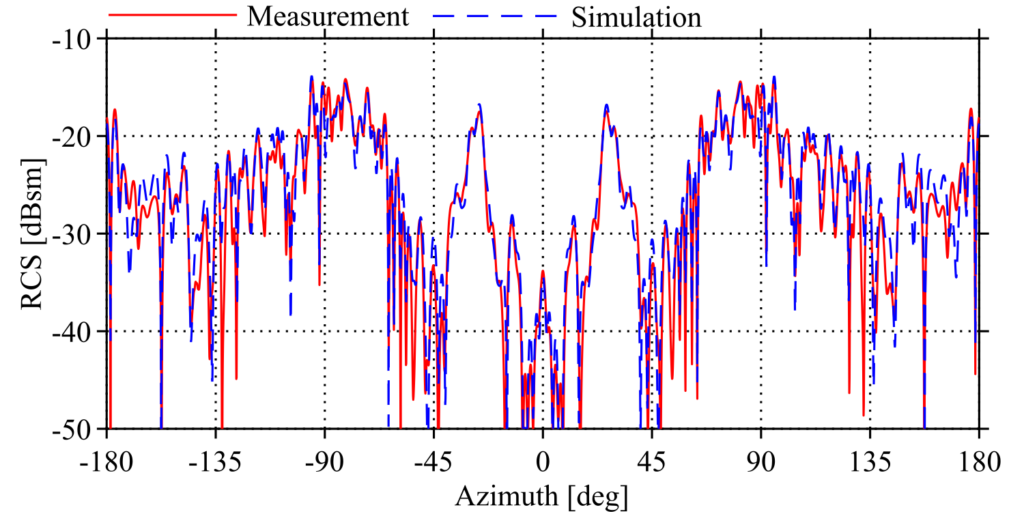
RCS測定結果の例(実線:実測,破線:電磁界シミュレーション)
実際に,最初の写真に示した航空機模型のRCS測定を行った結果が上に示す図です.縦軸は電波の反射強度を表すRCS,横軸は電波の照射方位を示し,0°が模型の正面(上の写真の状況),±180°が後ろ,±90°が航空機模型の真横から電波を照射した場合の反射強度を示しています.実線は実測値,破線は数値電磁界解析によるシミュレーション結果で,両者がよく一致しているのがわかります.この図を見ると,正面0°方向からレーダ波を照射した場合は反射が弱く,レーダから見つけづらいことがわかります.一方で,±90°付近ではRCSが大きくなり,レーダから発見されやすいことになります.その他,±30°付近にある大きな山(ピーク)は航空機模型の翼からの反射です.このように,目標のRCSがわかれば,レーダから目標がどのように見えるかが一目でわかるようになります.

遠方界条件
RCSは目標物の遠方で定義される量で,遠方とみなせる距離(遠方界条件)は目標が大きくなるほど,またレーダ波の周波数が高くなり波長が短くなるほど増大します.上記の遠方界条件の計算式に基づくと,幅1 mの目標を10 GHzの周波数で観測する場合,遠方とみなせる距離は66.7 mに及びます.このように,高い周波数で大きな目標のRCSを直接測定しようとすると,確保すべきアンテナと目標との距離は非常に長くなり,測定設備(大型の電波暗室は非常に高価)や用地の問題から直接測定は現実的な選択肢ではなくなる場合があります.
前置きが長くなりましたが,ようやくここで登場するのがタイトルにもある近傍界遠方界変換(Near-Field-to-Far-Field Transformation: NFFFT,Near-Far変換,NF変換など)と呼ばれる技術です.NFFFTとは近傍(遠方界条件を満たさない距離)で測定した電磁界(散乱界)をRCSが定義される遠方界へ変換する信号処理のことをいいます.このNFFFTにもいくつかの手法がありますが,当研究室で着目しているのがレーダ画像方式またはISAR(Inverse SAR, 逆合成開口レーダ)方式のNFFFTです.
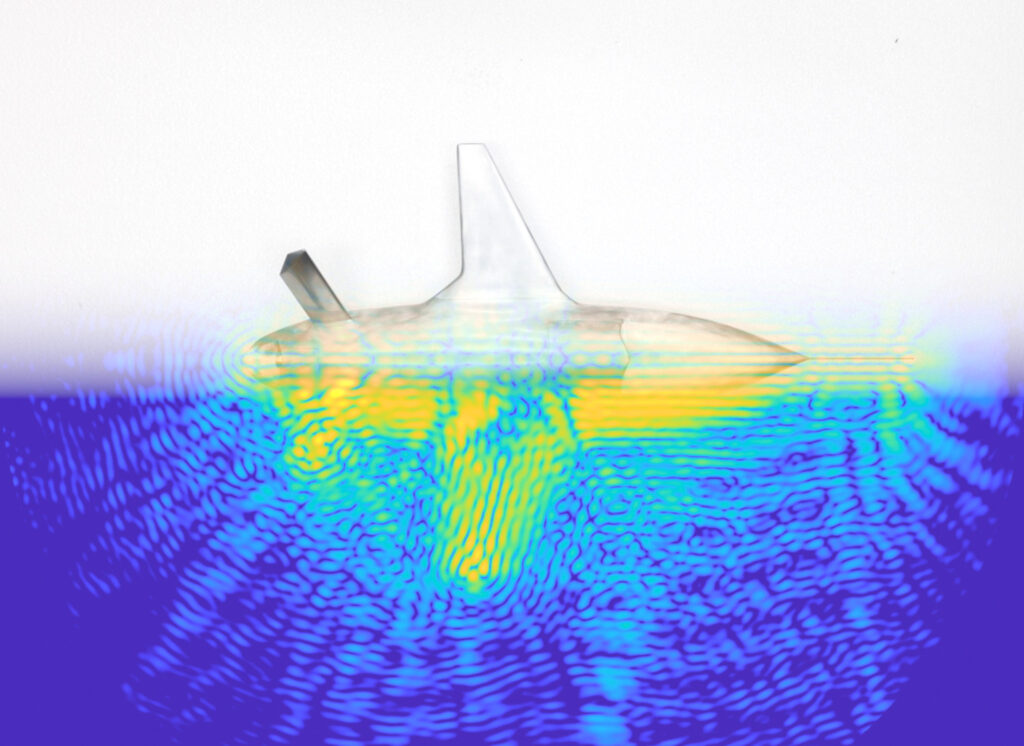
ISAR画像の例(写真との重ね合わせ)
上の画像のように,まずは近傍で測定した電磁界からSARの原理に基づいてレーダ画像を生成します.例えば,送受信アンテナを特定の位置に固定し,目標物を回転台の上に配置して回転させながら電波の送受を行います.この場合,アンテナは目標の周囲を相対的に円軌道で回転するということになり(円形のアンテナ走査),Circular SARと同じアルゴリズムでレーダ画像が生成できます.
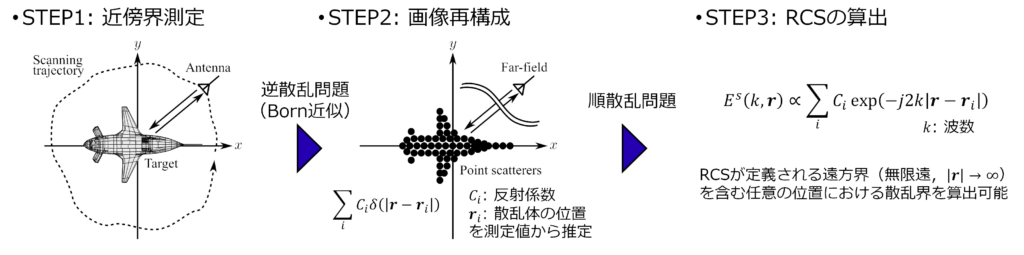
レーダ画像方式NFFFTの原理
上の図のように,レーダ画像方式のNFFFTではこの生成されたレーダ画像を電磁波の放射源とみなし,これにより遠方界を含む任意のアンテナ位置での電磁界を計算します.この計算で求めた遠方界での電磁界から,RCSが計算できることになります.
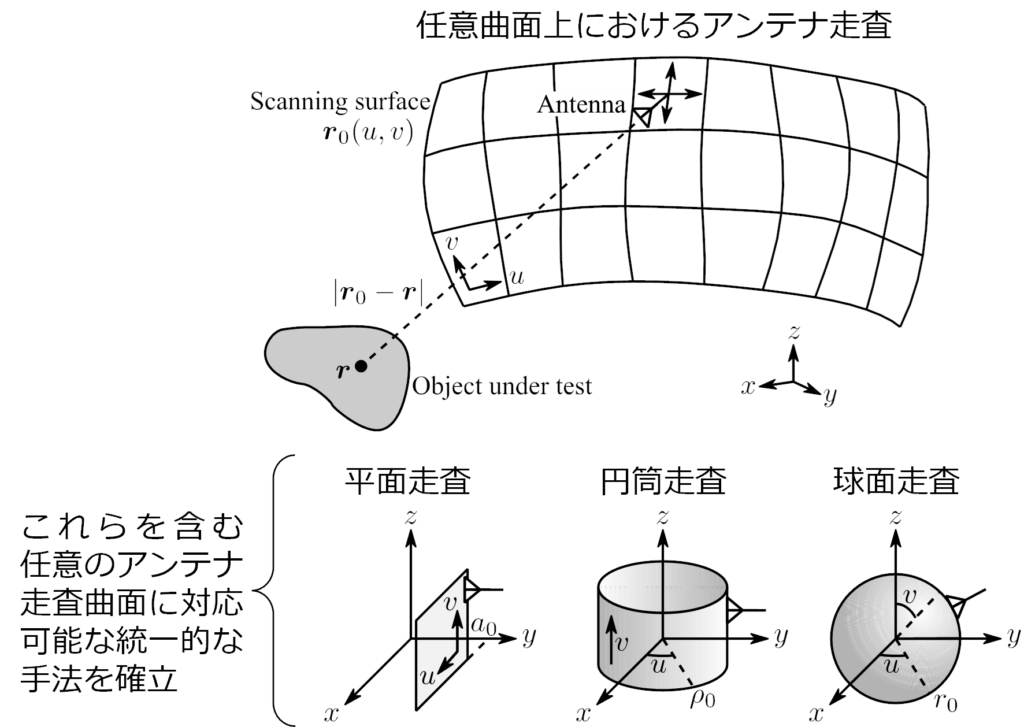
当研究室で開発したNFFFT法(任意曲面上のアンテナ走査に対応)
従来のレーダ画像方式NFFFTは,アンテナの走査軌道が直線や平面,円や円筒など,単純な形状に限定されていました.当研究室ではこの従来の測定理論を一般化して任意軌道のアンテナ走査によるNFFFT法を開発し,測定の自由度を大幅に向上させることに成功しました.今後は本手法をドローン搭載SARや車両搭載SARなどへ応用し,室内に収容が困難な大型目標のRCS測定の実現を目指しています.

